Yazı, bir çizgi lazer seviyesi cihazından oluşturulan hassas bir yatay lazer çizgisine yanıt vererek çalışan ve bağlı aletin veya iş çalışmasının hizalamasını son derece mükemmellik ve doğrulukla otomatik olarak ayarlayan basit bir çizgi lazer kontrollü motor sürücü devresini açıklıyor.
Çizgi Lazeri nedir
Çizgi lazer ekipmanı, marangozların eskimiş su terazisi ayarlayıcısının yüksek hassasiyetli elektronik bir değişimidir.
Çizgi lazer cihazı aslında 360 ° üretebilen gelişmiş bir lazer yayan ekipmandır. ° Tüm endüstriyel veya inşaat mühendisliği işlerine kalibrasyon referansı sağlamak için yüksek hassasiyetli aydınlatmalı yatay lazer çizgisi, böylece işin nihai sonucu mükemmel düz ve en ufak bir hata olmadan hizalanır.
Devre, bu blogun kendini adamış okuyucularından biri olan Bay Rafal tarafından talep edildi.
Çizgi lazer kontrollü motorun çalışma prosedürü ile ilgili ayrıntılı tartışmalar aşağıdaki paragraflardan öğrenilebilir:
Tasarım Hedefi
Bay. Rafal: Bu konuda çok yeniyim. Son haftalarda biraz araştırma yaptım ve tam olarak ihtiyacım olanı bulamadım.
Herhangi bir yardım için minnettar olacağım. Fikrimin bir fotoğrafını ekliyorum. Lazer seviyesi ile iki adet 12 V DC motoru kontrol etmek istiyorum.
Çizgi lazer seviyesi alıcılara sinyal verecektir.

Bu sinyalin daha sonra 12 V DC motorun yönünü kontrol etmesi gerekecektir. Motor, aletin yüksekliğini ayarlamak için dişli çubuğu ileri geri döndürür.
Bulduğum kadarıyla, paralel olarak bağlanmış birkaç fotodiyot olacaktı, bunlardan biri lazeri sıfır seviyesinin üstünde, diğeri de bu seviyenin altında tespit etmek için ayarlanmış. Sıfır seviyesi, sistemin uyanmasını önlemek için fotodiyotlar arasında sadece bir tür duraklamadır. Ekransız lazer sensör. Sadece resimli bir fotoğraf verdim.
Bir H köprü devresine ihtiyacım var, ancak bulduğum her şey bir Arduino sistemiyle kullanılacak. Gerekirse 30 dolara kadar makul bir fiyata hazır bir köprü satın alabilirim
İdeal olarak bu, hem kırmızı hem de yeşil lazerlerle çalışacaktır, ancak dalga boyları o kadar farklıdır ki, yapılabileceğinden şüpheliyim ve tüm ışık spektrumunda çalışmayacaktır.
Başlangıçta motorlara takılan bu kirişin seviyesini yukarı-aşağı butonları ile ayarlamak istiyorum. İkinci motor daha sonra onu ayarlarken jiroskopla aynı hizaya gelirse çok memnun olurum, ancak Arduino olmadan bu çok zor olabilir.
Yapmaya çalıştığım şeyin o kadar basit olduğunu hissediyorum ki Arduino kullanmadan kurtulabilirim. Ve bir şantiyedeki zor koşullar nedeniyle bir analogda ısrar ediyorum ve bana öyle geliyor ki, daha fazla elektronik, cihaz daha güvenilmez.
Sadece iç mekanlarda çalışacaktır ve lazer mesafesi max 10m'dir. Başlangıçta bulduğum motor 200mA maks. 2,19 A gibi büyük bir akım tüketimine ve aynı zamanda büyük bir torka sahip.
Bir Makita pilinden 18 V DC güç.
Herhangi bir öneri için şimdiden teşekkürler.
Polonya'dan selamlar
Rafal
Yağma : Motor millerinin çalışmasıyla ilgili bir kafa karışıklığım var. Her iki motordaki dişli vida aleti itecek, ancak geri çekemiyor mu? Bu nasıl işliyor?
Aynı şeyi tek bir motorla gerçekleştirmek mümkün mü?
Bay. Rafal: Daha düşük tesviye düz kenarları, sadece küçük odalar için, belki 70 cm olacaktır, örn. bir kapıdan girebilmeniz için bir tuvalet.
Tahriksiz makine, elle çekilmiş, sadece düz kenarları düzleştiriyor. Videoda, direklerdeki iki sarı nesne, düz kenarlara sağlam bir şekilde tutturulmuş lazer dedektörleridir.
Lazer daha uzakta bir yerde duruyor ve yatay bir çizgi oluşturuyor.
Motorlar bir arabaya ve dişli vida lazer dedektörleri ile tesviye düz kenarlarına takılacaktır. Her iki tarafı dengelemek için iki motor olması gerekir, ancak bu bir ayna görüntüsüdür.
Tek ortak kısım, sanki hazır bir modülden ve muhtemelen bir jiroskoptan yapıyormuşum gibi iki kanallı bir H köprüsü olurdu, ama bu bir rüya :).
Sol ve sağ motor devirleri için düğme olması önemlidir.
Prosedür bu. Lazeri, örneğin belirlenen zemin seviyesinin 2 m yukarısına asıyorum. Lazer ışınından düz kenarların alt kenarına kadar 2 metre ölçüyorum.
Sağ-sol anahtarlara basarak yüksekliği, düz kenarların alt kenarına kadar 2 metre olacak şekilde ayarlıyorum. Dedektörleri, fotodiyot bölümleri arasında lazer ışını sıfır olacak şekilde direklerin üzerine yerleştirdim. Ve gerisi kendi kendine yapacak
Ekte dedektör işleminin bir çizimini koydum.
Rafal
Devre tasarımı

Yukarıdaki şekle bakıldığında, ilgili motor kontrollü aletin lazer çizgisi doğruluğu açısından tespit edilmesi ve düzeltilmesi için bu tür iki özdeş devre aşaması gerekecektir.
İki özdeş aşama, aşağıda gösterildiği gibi birbirinin ayna görüntüleridir:

Devre oldukça basittir. LDR çifti aynı lazer çizgisi parlaklığıyla ortaya çıktığı sürece tahrik motorlarının çalışmamasını sağlayan bir pencere karşılaştırıcısı ile çalışır.
Daha sonra A1'in ters çevirmeyen girişinde ve A2'nin ters çevirme girişinde bir yarım besleme voltajı üretilir.
Lazer çizgisinde bir sapma tespit edilir edilmez (motor kontrollü alet düz hizalanmazsa meydana gelebilir), LDR'ler R1 ve R2'yi etkileyen parlaklık değişir.
Bu durumda, pencere komparatörüne giriş voltajı, besleme voltajının yarısından uzaklaşır. Bu durum, karşılaştırıcı çıktısının motor köprü ağına motoru saat yönünde veya saat yönünün tersine hareket ettirme komutu vermesine neden olur.
Transistörler T1. . . T4, motorun içeri anahtarlanmasını sağlamak için bir köprü ağı gibi yapılandırılmıştır. ileri ve geri yönler LDR aydınlatmasına veya lazer çizgisi sapma açısına bağlı olarak.
Diyotlar D1. . . D4, motorun avive olduğu ve çalıştığı süre boyunca üretilen tepe gerilimlerini iptal edecek şekilde konumlandırılmıştır. Önceden ayarlanmış potansiyometreler P1 ve P2'nin işlevi, hizalama ayarlamalarını kolaylaştırmak içindir.
Bunlar, ilgili LDR çifti tam olarak aynı lazer ışığı parlaklığına maruz kaldığı sürece motorun tamamen kapatılmasını ve devre dışı kalmasını sağlamak için ince ayarlanmıştır.
Örneğin, motor kontrollü aletin yanlış hizalanması nedeniyle, lazer çizgisi eğimi, ışığın LDR R2'de LDR R1'e göre azalmasına neden olur. Bu, A noktasındaki voltajın, besleme voltajının yarısının üzerine çıkmasına neden olacaktır.
Bu durumda, A1 op amp çıkışı yükselir ve T1 ve T4 transistörlerini çalışmaya zorlar. Bu da motorun ilgili yönde dönmesine neden olur. Bu işlem, bağlı aleti, yatay hizalama doğruluğu lazer çizgisi doğruluğu ile çakışana kadar otomatik olarak düz bir çizgide kaydırır.
Tersine, aletin, LDR'lerin aydınlatmasının yukarıda tartışılanın tersi olacağı şekilde ters yönde eğildiğini varsayarsak, A noktasındaki voltajın, besleme voltajının yarısının altına düşmesine neden olur. Bu koşul, A2 op amp çıkışının T3 ve T2'nin işlevsel hale geleceği şekilde yüksek gitmesini tetikler.
Bu, aletin ilgili yönde hizalamasını lazer çizgisinin yatay doğruluğu ile tam olarak çakışana kadar düzeltmek amacıyla motorun artık ters yönde çalışmasına neden olur.
Yukarı / Aşağı Düğmesi
Su terazisinin yüksekliğini başlangıçta önceden ayarlamak için yukarı aşağı düğmeleri, her bir LDR'ye paralel olarak basma düğmeli anahtarların kablolanmasıyla basit bir şekilde uygulanabilir.
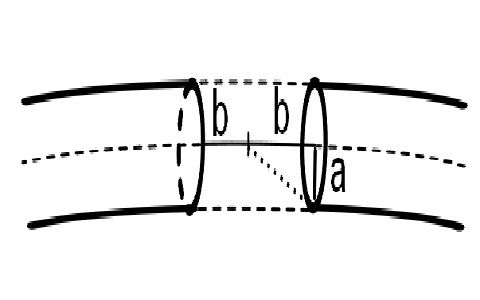
LDR Kurulumu
LDR'lerden doğru yanıtı almak için, sol sağ çiftler, başka herhangi bir ortam ışığını değil, yalnızca lazer aydınlatmasını 'görebilecekleri' şekilde, tüp benzeri bir muhafaza içine yerleştirilmelidir.
Fikre aşağıdaki görüntüden tanık olunabilir:

Burada, LDR'lerin birbirlerine çok yakın konumlandırıldığını görebiliriz, bu da lazer çizgisi tam merkezde olduğunda, her iki LDR çiftinin bir kısmının lazer ışığı ile eşit şekilde aydınlatılmasını sağlar.
LDR muhafazasının önü dağınık bir mercekle kaplanabilir, böylece lazer aydınlatması ilgili LDR'ler üzerinde içeride eşit şekilde yayılabilir.
Önceki: Değerli Eşyaları Korumak İçin Basit Hırsızlık Önleme Alarm Devresi Sonraki: Evrensel BJT, JFET, MOSFET Test Devresi