Giriş
Tek fazlı asenkron motorlar, cihazlarda ve endüstriyel kontrollerde yaygın olarak kullanılmaktadır. Kalıcı Bölünmüş Kapasitör (PSC) tek fazlı asenkron motor, bu tipteki en basit ve en yaygın kullanılan motordur.
PSC motorları tasarım gereği tek yönlüdür, yani tek yönde dönecek şekilde tasarlanmıştır. Ekstra sargılar ve harici röleler ve anahtarlar ekleyerek veya dişli mekanizmaları kullanarak dönüş yönü değiştirilebilir. Bu fikirde, bir PIC16F72 mikro denetleyici ve güç elektroniği kullanarak bir PSC motorunun hızının her iki yönde nasıl kontrol edileceğini ayrıntılı olarak tartışacağız.
PIC16F72 mikro denetleyici, Microchip'in portföyünde bulunan en basit ve düşük maliyetli genel amaçlı mikro denetleyicilerden biri olduğu için seçilmiştir. Ölü bant takılı tamamlayıcı PWM çıkışlarını sürmek için donanımda PWM'ler olmasa da, tüm PWM'ler, zamanlayıcılar kullanılarak bellenimde oluşturulur ve genel amaçlı çıkış pinlerine çıktı.
Değişken Frekanslı Sürücü nedir?
Değişken Frekanslı Sürücü veya VFD, değişken frekanslı AC besleme voltajı uygulayarak endüksiyon motorunun hızının kontrol edilmesini sağlayan yoldur. Çıkış AC frekansını kontrol ederek, motoru gereksinimlere göre farklı hızlarda sürmek mümkündür. Bunlar, büyük ölçüde pompalar, havalandırma sistemleri, asansörler, takım tezgahı sürücüleri gibi endüstriyel uygulamalarda kullanılan ayarlanabilir hızlı sürücülerdir. Esasen enerji tasarrufu sağlayan bir sistemdir. Bu nedenle, ilk gereklilik, VFD için farklı frekanslara sahip bir sinüs dalgası oluşturmaktır.
VFD'de benimsenen teknoloji nedir?
Motorun hızını ihtiyaca göre kontrol etmek için değişen frekanslarda AC çıkış veren sistemdir. Çoğu cihaz Tek fazlı AC beslemede çalıştığı için Tek Fazlı Değişken Frekans İnvertörler daha yaygındır. 230/110 Volt AC'yi yaklaşık 300/150 volt DC'ye dönüştürmek için tam dalgalı bir köprü doğrultucudan oluşur. Köprü redresöründen gelen DC çıkışı, AC dalgalarını gidermek için yüksek değerli bir yumuşatma kapasitörüyle düzleştirilir. Bu sabit voltajlı DC daha sonra MOSFET (Metal oksit alan etkili transistör) / IGBT (Yalıtılmış Geçit Bipolar Transistör) transistörlerinden oluşan frekans üretici devreye beslenir. Bu MOSFET / IGBT devresi DC'yi alır ve cihazın hızını kontrol etmek için değişken frekanslı AC'ye dönüştürür.
Frekans değişimi, elektronik devreler veya Mikrodenetleyici kullanılarak elde edilebilir. Bu devre, MOSFET / IGBT devresinin geçit sürücüsüne uygulanan voltaj frekansını (PWM) değiştirir. Böylece çıkışta değişken frekanslı AC voltajı belirir. Mikrodenetleyici, ihtiyaca göre çıkışın frekansını değiştirecek şekilde programlanabilir.
VFD Sistemi:
Değişken Frekans Cihazı, bir AC motor, bir Denetleyici ve bir İşletim arabirimi gibi üç parçaya sahiptir.
VFD'de kullanılan AC motor, tek fazlı olmasına rağmen genellikle üç fazlı bir asenkron motordur. motor bazı sistemlerde kullanılmaktadır. Genellikle sabit hızda çalışma için tasarlanmış motorlar kullanılır, ancak bazı motor tasarımları standart tasarıma göre VFD'de daha iyi performans sunar.
Denetleyici parçası, AC'yi DC'ye ve ardından yarı sinüs dalgası AC'ye dönüştürmek için katı elektronik güç dönüştürücü devresidir. İlk bölüm, bir tam dalgalı doğrultucu köprüsüne sahip olan AC'den DC'ye dönüştürücü bölümüdür ve genellikle bir üç faz / tek fazlı tam dalga köprüsüdür. Bu DC ara ürünü daha sonra inverter anahtarlama devresi kullanılarak yarı sinüs dalgası AC'ye dönüştürülür. Burada MOSFET / IGBT transistörleri DC'yi AC'ye çevirmek için kullanılır.
İnvertör bölümü, üç fazlı motoru sürmek için DC'yi üç AC kanalına dönüştürür. Denetleyici bölümü ayrıca gelişmiş güç faktörü, daha az harmonik bozulma ve giriş AC geçişlerine düşük hassasiyet sağlayacak şekilde tasarlanabilir.
Volt / Hz kontrol:
Kontrol devresi, sağlanan AC'nin frekansını motora volt başına hertz kontrol yöntemi ile düzenler. AC motor, belirtilen torku vermek için frekans değiştiğinde değişken uygulanan voltaj gerektirir. Örneğin, motor 50 Hz'de 440 voltta çalışacak şekilde tasarlandıysa, o zaman motora uygulanan AC, frekans yarıya (25 Hz) değiştiğinde yarıya (220 volt) düşürülmelidir. Bu düzenleme Volt / Hz'ye dayanmaktadır. Yukarıdaki durumda, oran 440/50 = 8,8 V / Hz'dir.
 Diğer voltaj kontrol yöntemleri:
Diğer voltaj kontrol yöntemleri:
 Diğer voltaj kontrol yöntemleri:
Diğer voltaj kontrol yöntemleri:Volt / Hz kontrolünün yanı sıra, Doğrudan Tork Kontrolü veya DTC gibi daha gelişmiş yöntemler, Uzay Vektör Darbe Genişlik Modülasyonu (SVPWM) , vb. ayrıca motorun hızını kontrol etmek için kullanılır. Motordaki voltajı kontrol ederek, manyetik akı ve tork hassas bir şekilde kontrol edilebilir. PWM yönteminde, invertör anahtarları Pseudo sinüzoidal değişen darbe sürelerine sahip bir dizi dar darbe yoluyla yarı sinüs dalgası üretir.
İşletim Arayüzü:
Bu bölüm, kullanıcının motoru çalıştırmasına / durdurmasına ve hızı ayarlamasına izin verir. Diğer olanaklar arasında motorun ters çevrilmesi, manuel ve otomatik hız kontrolü arasında geçiş, vb. Yer alır. İşletim arayüzü, motorun hızını, uygulanan voltajı, vb. Gösteren ekran veya göstergeler ve sayaçlar içeren bir panelden oluşur. sistemi kontrol etmek için.
Dahili - Yumuşak Başlangıç:
Bir AC anahtarı kullanılarak çalıştırılan sıradan bir endüksiyon motorunda, çekilen akım nominal değerden çok daha yüksektir ve motorun tam hızına ulaşmak için yükün artan ivmesi ile artabilir.
Öte yandan, VFD kontrollü bir motorda başlangıçta düşük frekansta düşük voltaj uygulanır. Bu frekans ve voltaj, yükü hızlandırmak için kontrollü bir oranda artar. Bu, motorun nominal değerinden neredeyse daha fazla tork geliştirir.
VFD Motor Değişim :
Frekans ve uygulanan gerilim önce kontrollü bir seviyeye indirilir, ardından sıfır olana kadar azalmaya devam edilir ve motor kapanır.
Tek Fazlı Asenkron Motorun hızını kontrol etmek için Uygulama Devresi
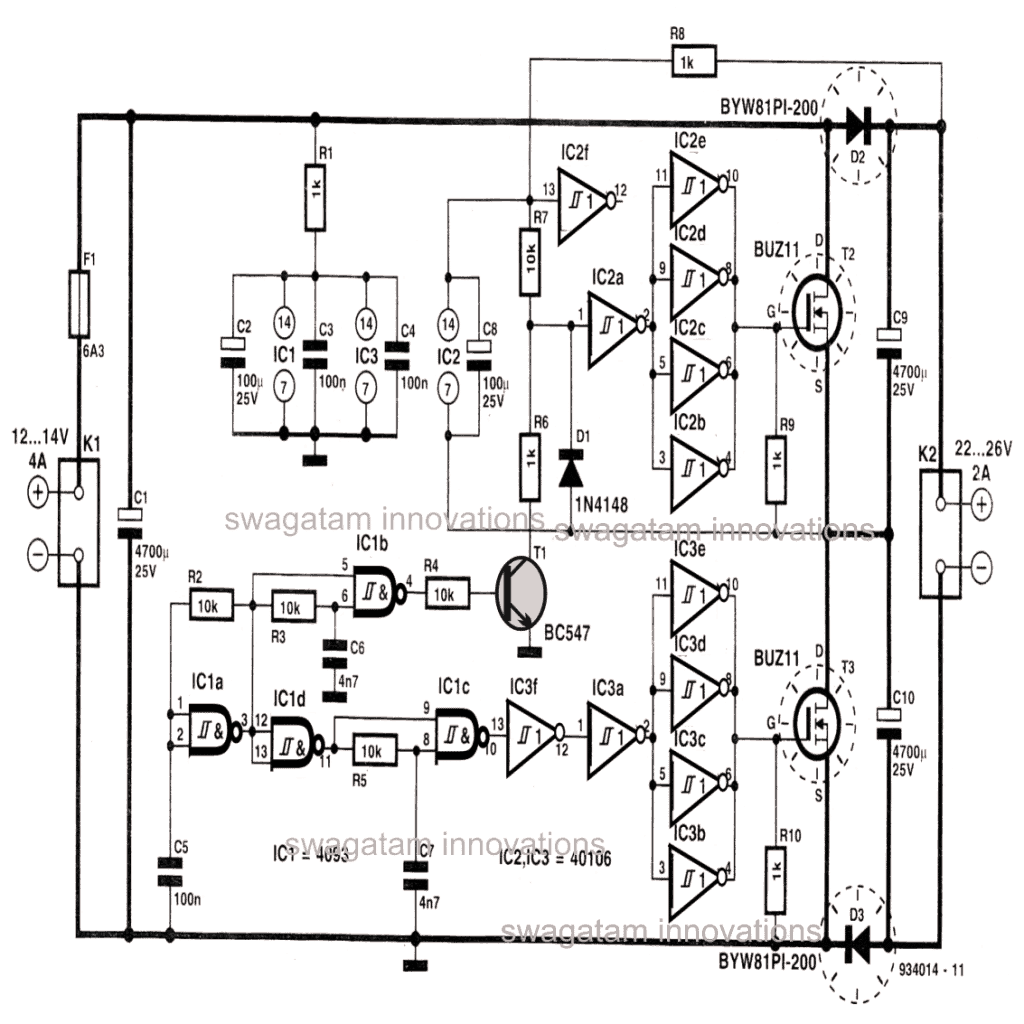
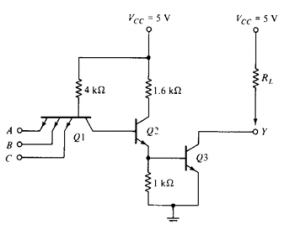
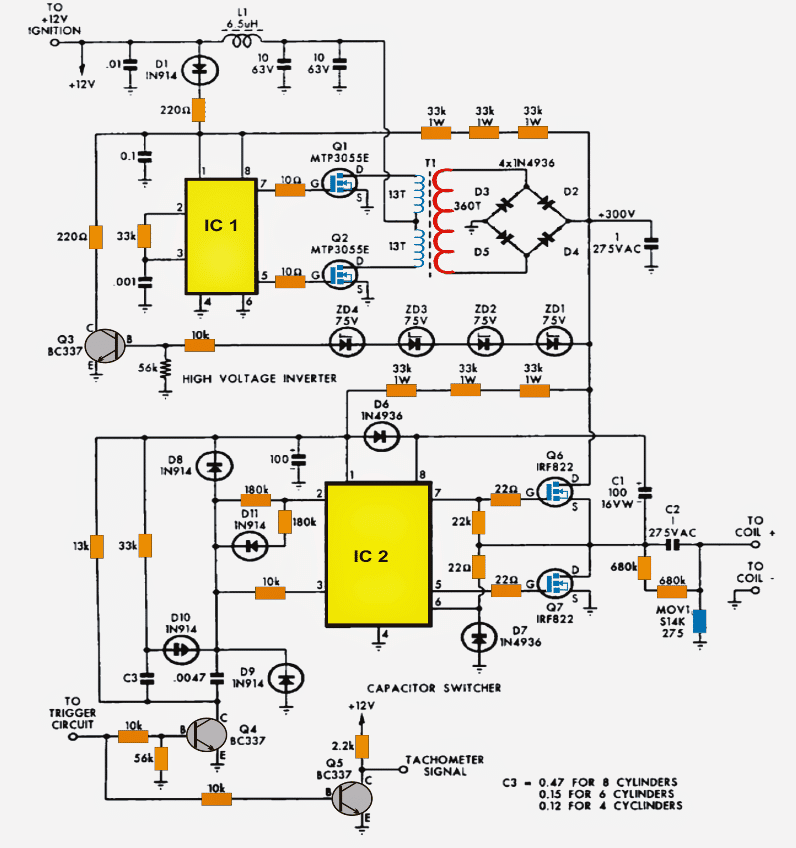
Yaklaşım, güç devresi ve kontrol devresi söz konusu olduğunda nispeten kolaydır. Giriş tarafında voltaj katlayıcılar kullanılır ve çıkış tarafında Şekil 2'de gösterildiği gibi bir H-köprüsü veya 2-fazlı invertör kullanılır. Ana ve başlangıç sargılarının bir ucu her bir yarım köprüye ve diğer uçlar AC güç kaynağının nötr noktasına bağlanır.
Kontrol devresi, tamamlayıcı çıkışlar arasında yeterli ölü bant bulunan iki tamamlayıcı çifte sahip dört PWM gerektirir. PWM ölü bantları PWM0-PWM1 ve PWM2-PWM3'tür. PIC16F72, ihtiyacımız olan şekilde çıktı vermek için donanımda tasarlanmış PWM'lere sahip değildir. VF ile ilgili olarak, dc veri yolu, frekans ve genliği değiştirerek sentezlenir. Bu, faz dışı iki sinüs voltajı verecektir.
Ana sargıya uygulanan voltaj, başlangıç sargısını 90 derece geciktirirse, motor bir (yani ileri) yönde çalışır. Dönüş yönünü değiştirmek istiyorsak, ana sargıya uygulanan voltaj, başlangıç sargısını yapmaktır.
Umarım yukarıdaki makaleden asenkron motor için değişken frekanslı sürücü hakkında bir fikriniz vardır. bu nedenle, bu konsept veya elektrikle ilgili herhangi bir sorunuz varsa ve elektronik proje lütfen aşağıdaki yorumlar bölümünü bırakın.