
CAN veya Denetleyici Alan Ağı, iki kablolu yarı çift yönlü yüksek hızlı seri ağ teknolojisidir. Temel olarak bir otomobil gibi düşük yarıçaplı bir bölgedeki farklı cihazlar arasında iletişimde kullanılır. CAN protokolü, bir CSMA-CD / ASM protokolüdür veya taşıyıcı, mesaj önceliği protokolünde çoklu erişim çakışma algılama tahkimlerini algılar. CSMA, her düğümün herhangi bir mesaj göndermeden önce belirli bir süre beklemesini sağlar. Çarpışma algılama, mesajları önceden belirlenmiş önceliklerine göre seçerek çarpışmanın önlenmesini sağlar.
125kbps ile 1 Mbps arasında sinyalleşme hızı sağlar. 2048 farklı mesaj tanımlayıcısı sağlar.
ISO-11898 standardıdır ve 7 katmanlı Açık Sistemler Arabağlantı modelini kullanır.
Tarih:
Robert Bosch tarafından 1982'de geliştirildi ve 1986'da Detroit Otomotiv Mühendisleri Derneği tarafından resmi olarak piyasaya sürüldü. CAN veri yoluna entegre ilk otomobil 1992'de Mercedes Benz tarafından üretildi.
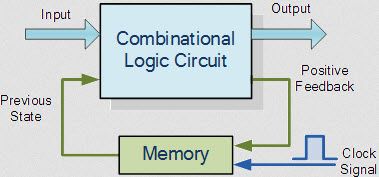
ISO 11898 Mimarisi:

Resim kaynağı - Theremino
Katmanlı mimari üç katmandan oluşur
- Uygulama katmanı : İşletim sistemi veya CAN cihazının uygulaması ile etkileşime girer.
- Veri Bağlantısı Katmanı : Veri gönderme, alma ve doğrulama açısından gerçek verileri protokole bağlar.
- Fiziksel katman : Gerçek donanımı temsil eder.
Standart CAN çerçevesi aşağıdaki bitlerden oluşur:
 Standart CAN çerçevesi aşağıdaki bitlerden oluşur:
Standart CAN çerçevesi aşağıdaki bitlerden oluşur:
- SOF- Fr Başlangıcı ame. Mesaj bu noktadan başlıyor.
- Tanımla : Mesajın önceliğine karar verir. İkili değeri düşürün, öncelik o kadar yüksektir. 11 bittir.
- RTR - Uzaktan İletim Talebi. Başka bir düğümden bilgi istendiğinde hakimdir. Her düğüm isteği alır, ancak yalnızca tanımlayıcısı mesajınkiyle eşleşen düğüm gerekli düğümdür. Her düğüm yanıtı da alır. Z
- İŞTE - Tek Kimlik Uzantısı. Baskın ise, herhangi bir uzantı içermeyen standart bir CAN tanımlayıcısının iletilmediği anlamına gelir.
- R0 - ayrılmış bit.
- DLC - Veri Uzunluğu Kodu. Gönderilen verinin uzunluğunu tanımlar. 4 bit
- Veri - 64 bit'e kadar veri iletilebilir.
- CRC - Döngüsel Artıklık Kontrolü. Hata tespiti için önceki uygulama verilerinin sağlama toplamını (aktarılan bit sayısı) içerir.
- ALAS - Onaylayın. 2 bitliktir. Doğru bir mesajın alınması hakimdir.
- EOF - çerçevenin sonu. Kutu çerçevesinin sonunu işaretler ve bit doldurmayı devre dışı bırakır.
- IFS - Ara Çerçeve Alanı. Doğru bir şekilde alınan bir çerçeveyi uygun konumuna taşımak için denetleyicinin ihtiyaç duyduğu zamanı içerir.
5 Farklı mesaj türü:
- Veri çerçevesi : Rasgele bir alan, veri alanı, CRC alanı ve onay alanlarından oluşur.
- Uzak Çerçeve : Başka bir düğümden veri iletimini ister. Burada RTR biti çekiniktir.
- Hata Çerçevesi : Bir hata tespit edildiğinde iletilir.
- Aşırı Yük Çerçevesi : Mesajlar arasında gecikme sağlamak için kullanılır. Düğümler çok meşgul olduğunda iletilir.
- Geçerli Çerçeve : EOF alanı resesif ise bir mesaj geçerlidir. Aksi takdirde mesaj tekrar iletilir.
CAN Fiziksel Katman:
CAN Bus

Resim kaynağı - digital.ni
İki kablolu bir seri bağlantıdan oluşur - CAN_H ve CAN_L ve birbirlerine göre voltaj seviyeleri 1 veya 0 aktarılıp aktarılmadığını belirler. Bu diferansiyel sinyalleşmedir. Her sinyal hattında akan akım eşittir ancak ters yöndedir, bu da düşük gürültü emisyonlarının anahtarı olan alanı iptal etme etkisiyle sonuçlanır. Bu, gürültü bağlantısını azaltan ve teller üzerinden yüksek aktarım oranına izin veren dengeli bir diferansiyel sinyalizasyon sağlar. Genellikle kablolar, veriyolu uzunluğu 40 m ve maksimum 30 düğüm olan bükülmüş çift kablolardır. 120 Ohm karakteristik empedansa sahip korumalı veya ekransız bir kablodur.
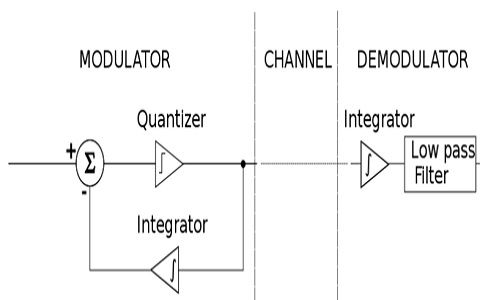
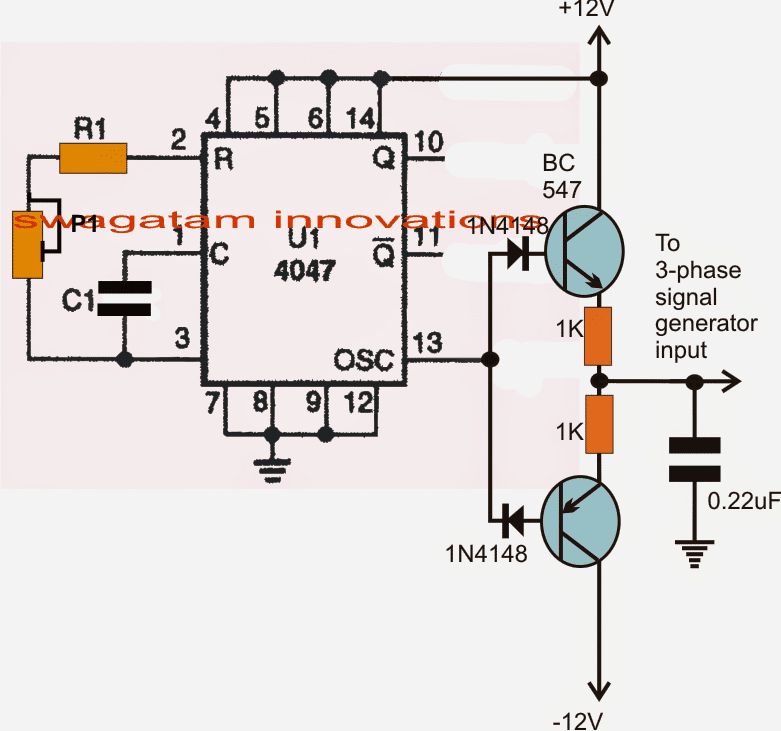
ALICI OLABİLİR:

Hugo Provencher marka araçlar için CAN. İki kablo CANH ve CANL, iki transistör ve 2.5V voltaj kaynağı tarafından belirlenen normalde 2.5V'dedir. Temel olarak iki kablo arasındaki fark her zaman 0 olmalıdır. Sürücü kontrolü CANH ve CANL kablolarına uygulanan gerilimi belirler. Her iki transistör de iletken olduğunda, 1 boyunca voltaj düşüşüstTransistör ve diyot 1.5V'dur ve CANH telini 3.5V'a çıkarır. 2 boyunca voltaj düşüşündtransistör ve diyot 1V'dir ve CANL telinin 1.5V'a çekilmesini sağlar. Diyotlar, yüksek voltaj koruması için kullanılır. Alıcı, iki giriş CANH ve CANL aynı olduğunda 1 çıkış veren ve iki giriş farklıysa 0 çıkış veren bir ayırıcı devredir. TXD baskın bloğu, topraklama hatası koruması için kullanılır ve Termal kapatma bloğu, diyotlar ve transistörler aşırı ısınırsa sürücü kontrolünü devre dışı bırakır.
CAN'ın Avantajları:
- Dağıtılmış bir kontrol olduğu için kablolamayı azaltır ve bu, sistem performansının iyileştirilmesini sağlar.
- Birçok CAN yongası üreticisi, veri bağlantı katmanını ve çipe arayüzlenen fiziksel katmanı sağlamıştır ve yazılım geliştiricinin tek yapması gereken, uygulama kodlamasını geliştirmektir.
- Farklı elektrik ortamlarında çalışma imkanı sağlar ve gürültüsüz iletim sağlar.
- Mesajlar önceliklerine göre iletildiği için trafik sıkışıklığı ortadan kalkar ve tüm ağın zamanlama kısıtlamalarını karşılamasına izin verir.
- Her düğüm, mesajın iletimi sırasında hataları kontrol edip hata çerçevesini gönderebildiğinden hatasız iletim sağlar.
CAN Çalışma Örneği:
Kontrolör Alan Ağı, endüstriyel ve araçlarda geniş uygulamalara sahiptir. En büyük uygulamalardan biri, bir araçtaki farklı cihazlar arasındaki iletişimle ilgilidir. Bir diğeri, farklı mikrodenetleyiciler arasında olabilir, bir şifreyi tespit etmek için, bir şifre kullanarak kilitli bir kapıyı açmak veya bir ampulü açmak gibi herhangi bir gereksinimi karşılamak için kullanılır.

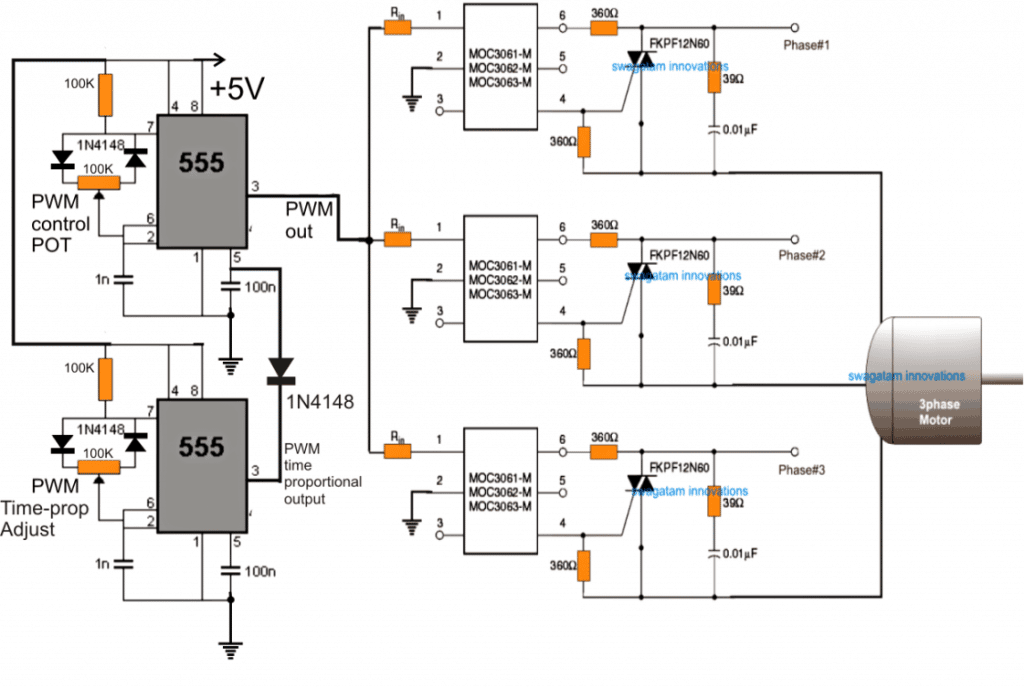
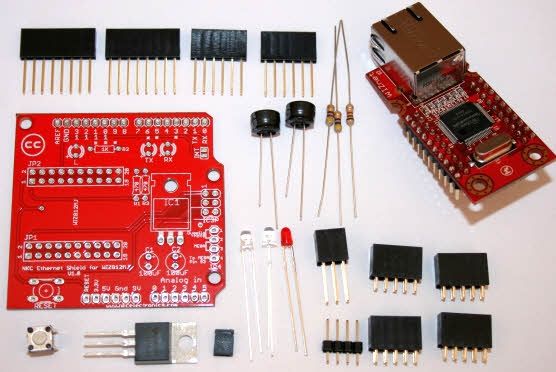
Denetleyici alanı ağ devresi
Temel uygulama, CAN ağındaki gibi iki kablo kullanarak birbiriyle iletişim kuran 3 mikro denetleyiciden oluşur. 1stmikrodenetleyici bir tuş takımı ile arabirimlidir, 2ndbir LCD ve üçüncüsü bir zil ve bir lambayı çalıştıran bir röle ile. Tuş takımına bir şifre girildiğinde, 2ndmikrodenetleyici bir alıcı gibi davranır ve iletilen mesajı 1'den azar azar alır.stVerici ve LCD'de mesajı görüntüler. Mesajın tamamı iletildiğinde, 2ndmikrodenetleyici doğrulamayı yapar ve şifre yanlışsa 3'e bir sinyal gönderir.rdMikrodenetleyici, bu sinyal ile birlikte zil sesi gönderir. Parola doğru olduğunda, 3rdmikrodenetleyici, sırayla lambayı açan röleyi çalıştırır.







{kind=link}
{kind=link}