Sunulan 3 fazlı VFD devresi ( benim tarafımdan tasarlandı ) herhangi bir üç fazlı fırçalanmış AC motorun veya hatta fırçasız bir AC motorun hızını kontrol etmek için kullanılabilir. Fikir, Bay Tom tarafından talep edildi
VFD'yi kullanma
Önerilen 3 fazlı VFD devresi, düzenleme verimliliğinin çok kritik olmadığı çoğu 3 fazlı AC motor için evrensel olarak uygulanabilir.
Kontrol etmek için özel olarak kullanılabilir sincap kafesli asenkron motor hızı bir açık döngü modu ile ve muhtemelen ayrıca makalenin sonraki bölümünde tartışılacak olan kapalı döngü modunda.
3 Fazlı İnvertör İçin Gerekli Modüller
Önerilen 3 fazlı VFD veya değişken frekanslı sürücü devresini tasarlamak için esas olarak aşağıdaki temel devre aşamaları gereklidir:
- PWM voltaj kontrol devresi
- 3 fazlı yüksek taraf / düşük taraf H-köprü sürücü devresi
- 3 Fazlı jeneratör devresi
- V / Hz parametresini oluşturmak için frekans dönüştürücü devresine voltaj.
Yukarıdaki aşamaların işleyiş detaylarını aşağıdaki açıklama yardımı ile öğrenelim:
Aşağıda verilen şemada basit bir PWM voltaj kontrol devresine tanık olunabilir:

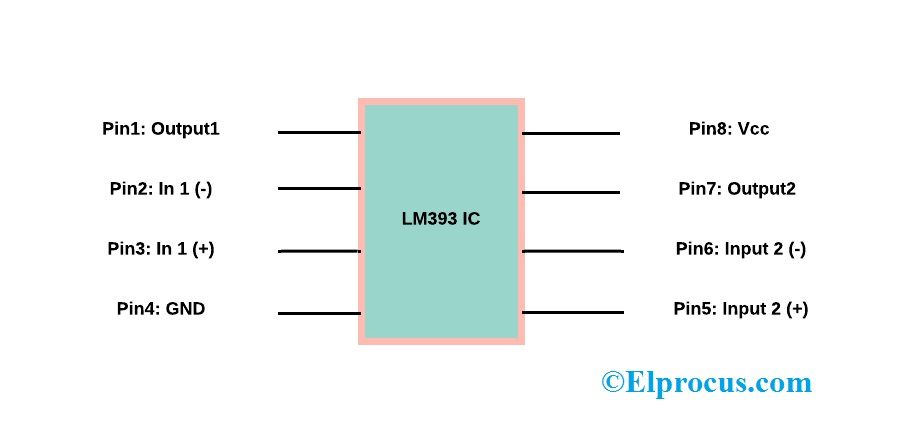
PWM Denetleyici
Aynı IC'nin pin5'inde uygulanan potansiyele yanıt olarak temelde IC2'nin pin3'ü boyunca değişen bir PWM çıkışı oluşturmak için tasarlanmış olan yukarıdaki PWM jeneratör aşamasının işleyişini zaten dahil etmiş ve açıkladım.
Şemada gösterilen 1K ön ayarı, daha sonraki işlemler için IC2'nin pin 3'ünde PWM'ler şeklinde istenen orantılı çıkış voltajı miktarını elde etmek için uygun şekilde ayarlanabilen RMS kontrol düğmesidir. Bu, 220V veya 120V AC RMS ana şebekesine eşdeğer olabilecek karşılık gelen bir çıkış üretecek şekilde ayarlanır.
H-Bridge Sürücü Devresi
Aşağıdaki bir sonraki şema, IC IRS2330 kullanan tek çipli bir H-köprüsü 3 fazlı sürücü devresini göstermektedir.
Karmaşıklıkların çoğu, yerleşik karmaşık devrelerdeki çipler tarafından ele alındığı için tasarım basit görünüyor.
IC'nin HIN1 / 2/3 ve LIN1 / 2/3 girişlerine 3 fazlı bir sinyal oluşturucu aşaması aracılığıyla iyi hesaplanmış 3 fazlı bir sinyal uygulanır.
Çıktıları IC IRS2330 drenleri kontrol edilmesi gereken motorla uygun şekilde yapılandırılmış olan 6 mosfet veya IGBTs köprü ağı ile entegre olarak görülebilir.
Alçak taraf mosfet / IGBT kapıları, köprü mosfet aşamasına PWM enjeksiyonunu başlatmak için yukarıda tartışılan PWM jeneratör devresi aşamasının IC2 pimi # 3 ile entegre edilmiştir. Bu düzenleme nihayetinde motorun ayarlara göre istenen hızı kazanmasına yardımcı olur (ilk diyagramdaki 1 k ön ayar aracılığıyla).

Aşağıdaki diyagramda gerekli 3 fazlı sinyal üreteci devresini görselleştiriyoruz.

3-Fazlı Jeneratör Devresini Yapılandırma
3 fazlı jeneratör, gösterilen pin çıkışları boyunca doğru şekilde boyutlandırılmış 3 fazlı sinyaller üreten bir çift CMOS yongası CD4035 ve CD4009 etrafında inşa edilmiştir.
3 fazlı sinyallerin frekansı, amaçlanan 3 fazlı sinyalin 6 katı olması gereken beslenen giriş saatlerine bağlıdır. Bunun anlamı, gerekli 3 faz frekansı 50 Hz ise, giriş saatinin 50 x 6 = 300 Hz olması gerekir.
Aynı zamanda, motor çalışma frekansını değiştirmekten sorumlu olacak olan IC sürücüsünün etkin frekansını değiştirmek için yukarıdaki saatlerin değiştirilebileceğini ima eder.
Bununla birlikte, yukarıdaki frekans değişikliğinin değişen voltaja yanıt olarak otomatik olması gerektiğinden, voltaj-frekans dönüştürücü gerekli hale gelir. Bir sonraki aşama, gerekli uygulama için frekans dönüştürücü devresine basit bir doğru voltajı tartışır.
Sabit V / F Oranı Nasıl Oluşturulur
Tipik olarak endüksiyon motorlarında, motor hızı ve torkunun optimum verimini korumak için, kayma hızı veya rotor hızının kontrol edilmesi gerekir, bu da sabit bir V / Hz oranını koruyarak mümkün hale gelir. Stator manyetik akısı, giriş besleme frekansına bakılmaksızın her zaman sabit olduğundan, rotor hızı tarafından kolayca kontrol edilebilir hale gelir. V / Hz oranını sabit tutmak .
Açık döngü modunda bu, önceden belirlenmiş V / Hz oranlarını koruyarak ve bunu manuel olarak uygulayarak kabaca yapılabilir. Örneğin ilk diyagramda bu, R1 ve 1K ön ayarının uygun şekilde ayarlanmasıyla yapılabilir. R1 frekansı belirler ve 1K çıkışın RMS'sini ayarlar, bu nedenle iki parametreyi uygun şekilde ayarlayarak gerekli V / Hz miktarını manuel olarak uygulayabiliriz.
Bununla birlikte, bir endüksiyon motor torku ve hızının nispeten doğru bir kontrolünü elde etmek için, bir kapalı döngü stratejisi uygulamalıyız; burada kayma hızı verilerinin, V / Hz oranının otomatik olarak ayarlanması için işleme devresine beslenmesi gerekir, böylece bu değer her zaman yaklaşık sabit kalır.
Kapalı Döngü Geri Bildirimini Uygulama
Bu sayfadaki ilk şema, aşağıda gösterildiği gibi kapalı döngü otomatik V / Hz düzenlemesini tasarlamak için uygun şekilde değiştirilebilir:

Yukarıdaki şekilde, IC2'nin 5 numaralı pimindeki potansiyel, aynı IC'nin 3 numaralı piminde üretilen SPWM'nin genişliğini belirler. SPWM, # 5'teki şebeke 12V dalgalanma örneğini, IC2'nin # 7 numaralı pimindeki üçgen dalga ile karşılaştırarak oluşturulur ve bu, motor kontrolü için alçak taraftaki mosfetlere beslenir.
Başlangıçta bu SPWM, belirtilen nominal hız seviyesinde rotor hareketini başlatmak için 3 fazlı köprünün alçak taraf IGBT kapılarını tetikleyen bir miktar ayarlanmış seviyeye (1K perset kullanılarak) ayarlanır.
Rotor rotoru dönmeye başlar başlamaz, rotor mekanizmalı takılı takometre, IC2'nin 5 numaralı piminde orantılı bir ek voltaj miktarının gelişmesine neden olur, bu orantılı olarak SPWM'lerin genişlemesine ve motorun stator bobinlerine daha fazla voltaj verilmesine neden olur. Bu, rotor hızında daha fazla artışa neden olarak IC2'nin 5 numaralı pininde daha fazla gerilime neden olur ve bu, SPWM eşdeğer voltajı artık artamayana ve stator rotor senkronizasyonu sabit bir duruma ulaşana kadar devam eder.
Yukarıdaki prosedür, motorun çalışma süreleri boyunca kendi kendini ayarlamaya devam eder.
Takometre Nasıl Yapılır ve Entegre Edilir
Aşağıdaki şemada basit bir takometre tasarımı görülebilir, bu, dönme frekansı BC547'nin tabanını besleyebilecek şekilde rotor mekanizmasına entegre edilebilir.

Burada rotor hızı verileri bir salon etkisi sensöründen veya bir IR LED / Sensör ağından toplanır ve T1 tabanına beslenir.
T1 bu frekansta salınır ve bir IC 555 tek kararlı devreyi uygun şekilde yapılandırarak yapılan takometre devresini etkinleştirir.
Yukarıdaki takometrenin çıkışı, T1'in tabanındaki giriş frekansına yanıt olarak orantılı olarak değişir.
Frekans yükseldikçe, en sağ taraftaki D3 çıkışındaki voltaj da yükselir ve bunun tersi de olur ve V / Hz oranını nispeten sabit bir seviyede tutmaya yardımcı olur.
Hız Nasıl Kontrol Edilir
Sabit V / F kullanan motorun hızı, IC 4035'in saat girişindeki frekans girişini değiştirerek elde edilebilir. Bu, bir IC 555 kararsız devreden veya herhangi bir standart kararsız devreden değişken bir frekansın saat girişine beslenmesiyle elde edilebilir. IC 4035.
Frekansın değiştirilmesi, motorun çalışma frekansını etkili bir şekilde değiştirir ve buna bağlı olarak kayma hızını düşürür.
Bu, takometre tarafından algılanır ve takometre, IC2'nin 5 numaralı pimindeki potansiyeli orantılı olarak azaltır, bu da motordaki SPWM içeriğini orantılı olarak azaltır ve sonuç olarak motorun voltajı azaltılır ve doğru hızda motor hızı değişimi sağlanır. gerekli V / F oranı.
Ev Yapımı V'den F'ye Dönüştürücü

Yukarıdaki voltaj-frekans dönüştürücü devresinde, bir IC 4060 kullanılır ve frekansa bağlı direnci, amaçlanan dönüştürmeler için bir LED / LDR tertibatı aracılığıyla etkilenir.
LED / LDR düzeneği, ışık geçirmez bir kutu içinde kapatılır ve LDR, IC'nin 1M frekansa bağımlı direnci boyunca konumlandırılır.
LDR / LDR yanıtı oldukça doğrusal olduğundan, LDR üzerindeki LED'in değişen aydınlatması, IC'nin pimi3 boyunca orantılı olarak değişen (artan veya azalan) bir frekans üretir.
Sahnenin FSD veya V / Hz aralığı, 1M direncini veya hatta C1 değerini uygun şekilde ayarlayarak ayarlanabilir.
LED, voltaj türetilir ve ilk PWM devre aşamasından itibaren PWM'ler aracılığıyla aydınlatılır. Bu, PWM'ler değiştikçe, LED aydınlatmasının da değişeceğini ve bunun da yukarıdaki diyagramda IC 4060'ın pim 3'te orantılı olarak artan veya azalan bir frekansa yol açacağını ima eder.
Dönüştürücüyü VFD ile entegre etme
IC 4060'tan gelen bu değişken frekansın artık 3 fazlı jeneratör IC CD4035 saat girişi ile entegre edilmesi gerekiyor.
Yukarıdaki aşamalar, 3 fazlı bir VFD devresi yapmak için ana bileşenleri oluşturur.
Şimdi, IGBT motor kontrol cihazlarını sağlamak için gereken DC BUS ve tüm tasarım için kurulum prosedürleri hakkında tartışmak önemli olacaktır.
IGBT H-köprü rayları boyunca uygulanan DC BUS, aşağıdaki devre yapılandırması kullanılarak mevcut 3 fazlı şebeke girişinin düzeltilmesiyle elde edilebilir. IGBT DC BUS rayları, 'yük' olarak belirtilen noktalara bağlanır

Tek fazlı bir kaynak için düzeltme, standart 4 diyotlu köprü ağ yapılandırması kullanılarak gerçekleştirilebilir.
Önerilen 3 fazlı VFD devresi nasıl kurulur
Aşağıdaki talimatlara göre yapılabilir:
DC bara voltajını IGBT'ler boyunca uyguladıktan sonra (motor bağlı olmadan), raylar üzerindeki voltaj istenen motor voltajı özelliklerine eşit olana kadar PWM 1k ön ayarını ayarlayın.
Daha sonra, IC IRS2330 girişlerinden herhangi birini, verilen motor özelliklerine göre gerekli doğru frekans seviyesine ayarlamak için IC 4060 1M ön ayarını ayarlayın.
Yukarıdaki prosedürler tamamlandıktan sonra, belirtilen motor bağlanabilir ve farklı voltaj seviyeleri, V / Hz parametresi ile beslenebilir ve bağlı motor üzerinden otomatik V / Hz işlemleri için onaylanabilir.
Önceki: Büyüyen Bir Işık Devresi Nasıl Oluşturulur Sonraki: Su Yumuşatma Devresi Keşfedildi