Bu projede, 555 zamanlayıcı IC kullanarak basit bir tek kutuplu step motor sürücü devresinin nasıl yapılacağını öğreneceğiz. 555 zamanlayıcının yanı sıra, on yıllık sayaç IC'si olan IC CD 4017'ye de ihtiyacımız var.
Ankit Negi tarafından
Önce bazı küçük değişiklikler yapmanız gerekse de, belirli bir görevi gerçekleştirmek için herhangi bir tek kutuplu motor bu devreye bağlanabilir.
Step motorun hızı, deşarj ve eşik arasına bağlanan bir potansiyometreden kontrol edilebilir 555 zamanlayıcı pimi .
Step Motor Temelleri
Step motorlar, sıradan dc motorlar kullanılarak elde edilemeyen, belirli bir dönüş miktarının gerekli olduğu alanlarda kullanılır. Tipik bir step motor uygulaması bir 3D YAZICI içindedir. İki tür popüler step motor bulacaksınız: UNIPOLAR ve BIPOLAR.
Adından da anlaşılacağı gibi, tek kutuplu step motor, tek tek kolayca enerjilendirilebilen ortak telli sargılar içerir.
Oysa bipolar step motor, önerilen devre kullanılarak basitçe çalıştırılamadığı için bobinler arasında ortak bir terminale sahip değildir. Bipolar step motoru sürmek için bir h-köprü devresine ihtiyacımız var.
BİLEŞENLER:
1. 555 ZAMANLAYICI IC

iki. CD 4017 IC

3. DİRENÇLER 4.7K, 1K


4. POTANSİYOMETRE 220K

5. 1 uf KONDANSATÖR

6. 4 DİYOT 1N4007

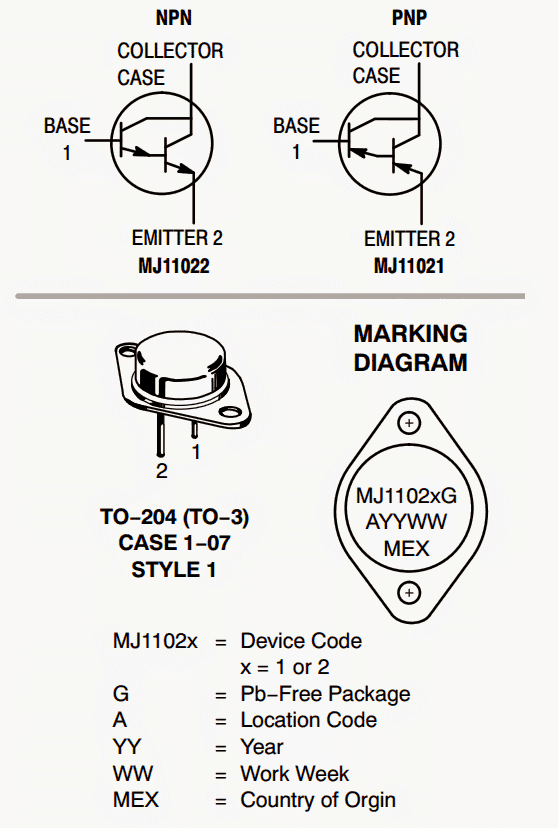
7. 4 TRANSİSTÖRLER 2N2222

8. UNIPOLAR STEPPER MOTOR

9. DC GÜÇ KAYNAĞI
555 ZAMANLAYICININ AMACI:
555 zamanlayıcı burada, step motorun hızını belirleyen belirli frekansta (220k pot kullanılarak değiştirilebilir) saat darbeleri üretmek için gereklidir.
IC 555 Pinout ayrıntıları

CD4017'NİN AMACI:
Yukarıda belirtildiği gibi, on yıllık bir sayaç IC'sidir, yani 10 saat darbesine kadar sayabilir. Bu IC'yi özel yapan şey, kendi dahili kod çözücüsüne sahip olmasıdır. İkili sayıların kodunu çözmek için ek bir IC eklemeniz gerekmediğinden.
4017, en fazla 10 saat darbesi sayar 555 saatleri 10 çıkış pininden her bir saat darbesine tek tek karşılık gelen yüksek çıkış verir. Bir seferde sadece bir pin yüksektir.
TRANSİSTÖRLERİN AMACI:
Burada transistörün iki amacı vardır:
1. Transistörler burada anahtarlar gibi davranır, böylece her seferinde bir bobine enerji verir.
2. Transistörler, çok az miktarda akım sağlayabildiğinden 555 zamanlayıcısını tamamen devre dışı bırakarak yüksek akımın kendilerinden sonra motordan geçmesini sağlar.
DEVRE ŞEMASI:

Şekilde gösterildiği gibi bağlantıları yapın.
1. 555 zamanlayıcının 3. pinini veya çıkış pinini IC 4017'nin 14. pinine (saat pinine) bağlayın.
2. 4017'nin etkinleştirme pimini veya 13. pimini toprağa bağlayın.
3. 3,2,4,7 pinlerini sırasıyla 1,2,3,4 transistörlerine birer birer bağlayın.
4. 10 ve 15. pimi 1k direnç üzerinden toprağa bağlayın.
5. Step motorun ortak kablosunu beslemenin artı ucuna bağlayın.
6. Step motorun diğer kablolarını, bir tam devri doğru bir şekilde tamamlamak için bobinlere tek tek enerji verecek şekilde bağlayın. (Motorun üretici tarafından sağlanan veri sayfasına bakabilirsiniz)
NEDEN IC 4017'NİN ÇIKIŞ PIN 10 PİN 15'İNE BAĞLI (SIFIRLA PIN)?
Yukarıda belirtildiği gibi 4017, saat darbelerini tek tek 10'a kadar sayar ve buna göre çıkış pinlerinde yüksek çıktı verir, her çıkış pini yükselir.
Bu, motorun dönüşünde gereksiz olan belirli bir gecikmeye neden olur. Motorun bir tam dönüşü için yalnızca ilk dört pime veya o'dan 3'e kadar ilk dört ondalık sayıma ihtiyacımız olduğundan, pim no. 10 pim 15'e bağlanır, böylece 4. sayım IC sıfırlanır ve sayım baştan başlar. Bu, motorun dönüşünde kesinti olmamasını sağlar.
ÇALIŞMA:
Bağlantıları doğru şekilde yaptıktan sonra, devreyi açarsanız motor adım adım dönmeye başlayacaktır. 555 timer direnç, potansiyometre ve kondansatör değerlerine bağlı olarak saat darbeleri üretir.
Bu üç bileşenli frekans darbesinden herhangi birinin değerini değiştirirseniz, saat darbesi değişecektir.
Bu saat darbeleri, daha sonra saat darbelerini birer birer sayan ve sırasıyla 3,2,4,7 numaralı pinlere çıkış olarak 1 veren ve bu işlemi sürekli tekrarlayan IC CD 4017'ye verilir.
Transistör Q1, pin 3'e bağlandığından, önce açılır, ardından Q2 transistörü ardından Q3 ve Q4 açılır. Ancak bir transistör açıkken diğeri kapalı kalır.
Q1 açıkken kapalı bir anahtar gibi davranır ve akım ortak telden 1. tele ve ardından transistör Q1 üzerinden toprağa akar.
Bu, bobine 1 enerji verir ve motor, saat frekansına bağlı olarak belirli bir açıda döner. Sonra aynı şey Q2 bobini 2'ye enerji veren bobin 3 ve bobin 4 ile olur. Böylece tam bir devir elde edilir.
Potansiyometre döndürüldüğünde:
Diyelim ki başlangıçta potun konumu, boşaltma ile eşik pimi arasında maksimum direnç (220k) olacak şekildedir. Çıkış saat darbesinin frekansı için formül:
F = 1,44 / (R1 + 2R2) C1
R2 değeri arttıkça saat darbelerinin sıklığının azaldığı formülden anlaşılmaktadır. Bu nedenle R2 veya pot değeri maksimum olduğunda, IC 4017'nin daha yavaş sayması ve daha gecikmeli çıktı vermesi nedeniyle frekans minimumdur.
R2 direncinin değeri düştükçe frekans artar ve bu da IC 4017'nin çıkışları arasında minimum gecikmeye neden olur. Böylece step motor daha hızlı döner.
Böylece potansiyometrenin değeri step motorun hızını belirler.
SİMÜLASYON VİDEOSU:
Burada motor hızının R2 direncine göre nasıl değiştiğini açıkça görebilirsiniz. Değeri önce azaltılır, sonra artar, bu da sırasıyla kademeli motorun hızını artırır ve sonra azaltır.
Önceki: Crank El Fenerleri Nasıl Çalışır? Sonraki: Hassas Okumalar için Arduino Takometre Devresi