Aynı zamanda robotik bir vinç gibi uygulanabilen bu robotik kol devresi, 6 servo motor kullanarak çalışır ve bir mikrodenetleyici uzaktan kumanda , Arduino tabanlı bir 2,4 GHz iletişim bağlantısı kullanarak.
Ana Özellikler
Robotik kol kadar sofistike bir şey inşa ederken, modern görünmeli ve sadece oyuncak benzeri işlevler değil, birçok gelişmiş özellik içermelidir.
Önerilen tam teşekküllü tasarımın yapımı nispeten kolaydır, ancak kablosuz veya uzaktan kumandalı komutlarla hassas bir şekilde kontrol edilebilen bazı gelişmiş manevra işlevleriyle ilişkilendirilmiştir. Motorlar uygun şekilde yükseltilirse tasarım endüstriyel kullanım için bile uyumludur.
Bu mekanik vincin robotik kol gibi temel özellikleri şunlardır:
- 180 derece dikey eksen üzerinde sürekli ayarlanabilir 'kol'.
- 180 derece dikey eksen üzerinde sürekli olarak ayarlanabilen 'dirsek'.
- 90 derecelik dikey eksen üzerinde sürekli olarak ayarlanabilen 'parmak sıkıştırma' veya Tutuş.
- 180 derece yatay düzlemde sürekli ayarlanabilir 'kol'.
- Tüm robotik sistem veya vinç kolu hareketli ve manevra kabiliyetine sahiptir. uzaktan kumandalı araba .
Kaba Çalışma Simülasyonu
Yukarıda açıklanan özelliklerden birkaçı, aşağıdaki GIF simülasyonunun yardımıyla görüntülenebilir ve anlaşılabilir:

Motor Mekanizması Konumları
Aşağıdaki şekil bize çeşitli motor konumları ve projenin uygulanması için kurulması gereken ilgili dişli mekanizmalarıyla ilgili net bir resim vermektedir:

Bu tasarımda işleri olabildiğince basit tuttuğumuzdan emin oluruz, böylece bir meslekten olmayan kişi bile ilgili motor / dişli mekanizmalarını anlayabilir. ve karmaşık mekanizmaların arkasında hiçbir şey gizli kalmaz.
Her motorun çalışması veya işlevi aşağıdaki noktaların yardımı ile anlaşılabilir:
- Motor # 1, robotun 'parmak kıstırma' ya da kavrama sistemini kontrol eder. Hareketli eleman, hareketler için doğrudan motorun miline menteşelenmiştir.
- Motor # 2, sistemin dirsek mekanizmasını kontrol eder. Kaldırma hareketini gerçekleştirmek için dişli sistemini egde etmek için basit bir kenar ile yapılandırılmıştır.
- Motor # 3, tüm robotik kol sistemini dikey olarak kaldırmaktan sorumludur, bu nedenle bu motorun yukarıdaki ikisinden daha güçlü olması gerekir. Bu motor aynı zamanda gerekli eylemleri gerçekleştirmek için dişli mekanizması kullanılarak entegre edilmiştir.
- Motor # 4, tüm vinç mekanizmasını 360 derecelik tam bir yatay düzlemde kontrol eder, böylece kol, tam olarak herhangi bir nesneyi alabilir veya kaldırabilir. saat yönünde veya saat yönünün tersine radyal aralık.
- Motor # 5 ve 6, tüm sistemi taşıyan platform için tekerlek görevi görür. Bu motorlar zahmetsizce sistem bir yerden başka bir yere hareket ettirilerek kontrol edilebilir ve ayrıca sol / sağ motorların hızlarını ayarlayarak sistemin doğu / batı, kuzey / güney hareketini kolaylaştırır. Bu basitçe iki motordan birinin azaltılması veya durdurulmasıyla yapılır, örneğin bir sağa dönüş başlatmak için, sağ taraftaki motor, dönüş tamamen veya istenen açıya gelene kadar durdurulabilir veya durdurulabilir. Benzer şekilde, bir sola dönüş başlatmak için sol motorla aynı şeyi yapın.
Arka tekerleğin kendisiyle ilişkili herhangi bir motoru yoktur, merkezi ekseni üzerinde serbestçe hareket edecek ve ön tekerlek manevralarını takip edecek şekilde menteşelidir.
Kablosuz Alıcı Devresi
Tüm sistem bir uzaktan kumanda ile çalışacak şekilde tasarlandığından, bir kablosuz alıcının yukarıda açıklanan motorlarla yapılandırılması gerekir. Ve bu, aşağıdaki Arduino tabanlı devre kullanılarak yapılabilir.

Gördüğünüz gibi, Arduino çıkışlarına bağlı 6 servo motor var ve bunların her biri, bağlı sensör NRF24L01 tarafından yakalanan uzaktan kumandalı sinyallerle kontrol ediliyor.
Sinyaller bu sensör tarafından işlenir ve istenen hız kontrol işlemleri için işlemi ilgili motora ileten Arduino'ya beslenir.
Bu sinyaller, potansiyometreleri olan bir Verici devresinden gönderilir. Bu potansiyometre üzerindeki ayarlama elemanları, yukarıda açıklanan alıcı devresine bağlanan ilgili motorların hız seviyelerini kontrol eder.
Şimdi verici devresinin nasıl göründüğüne bakalım:
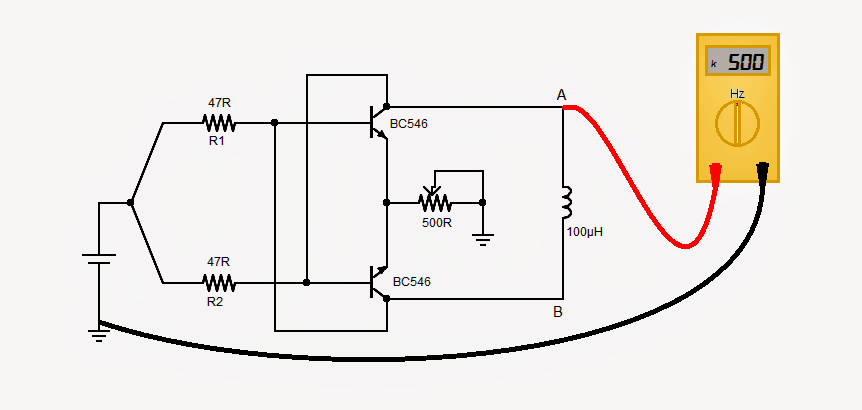
Verici Modülü

Verici tasarımı, Arduino kartına bağlı 6 potansiyometre ve ayrıca başka bir 2.4 GHz iletişim bağlantı cihazı ile görülebilir.
Tencere her biri için programlanmıştır. karşılık gelen bir motoru kontrol etmek alıcı devresiyle ilişkili. Bu nedenle, kullanıcı vericinin seçilen bir potansiyometresinin şaftını döndürdüğünde, robotik kolun ilgili motoru hareket etmeye ve sistemdeki özel konumuna bağlı olarak eylemleri uygulamaya başlar.
Motorun aşırı yüklenmesini kontrol etme
Sistem, ilgili mekanizma hareketleri bitiş noktalarına ulaştığında motorun aşırı yüklenmesini önlemek için herhangi bir sınırlayıcı düzenlemeye sahip olmadığından, motorların hareketli aralıkları boyunca hareketlerini nasıl sınırladığını merak edebilirsiniz.
Yani, örneğin, 'kavrama' nesneyi sıkıca tuttuktan sonra bile motor durmazsa ne olur?
Buna en kolay çözüm, bireysel eklemektir. mevcut kontrol modülleri bu tür durumlarda motor yanmadan veya aşırı yüklenmeden kilitli kalacak şekilde her bir motorla birlikte.
Aktif akım kontrolü nedeniyle, motorlar aşırı yük veya aşırı akım koşullarından geçmez ve belirli bir güvenli aralıkta çalışmaya devam eder.
Tam Program Kodu bulunabilir Bu makalede
Önceki: PC Hoparlörleri için USB 5V Ses Amplifikatörü Sonraki: 7 Modifiye Sinüs İnvertör Devresi Keşfedildi - 100W - 3kVA