
Günümüzde robotik, teknoloji alanında en gelişmişlerden biri haline geliyor. robotik uygulamaları esas olarak otomobil, tıp, inşaat, savunma ve aynı zamanda bir yangın söndürme robotu yangın kazasından insanlara yardım etmek. Ancak, robotu uzaktan kumanda veya anahtarla kontrol etmek oldukça karmaşıktır. Böylece ivmeölçer tabanlı hareket kontrol robotu olan yeni bir proje geliştirildi. Bu projenin temel amacı robotun hareketini ivmeölçer kullanarak el hareketi ile kontrol etmektir.

İvmeölçer tabanlı Hareket Kontrol Robotu
İvmeölçer tabanlı Hareket Kontrol Robotu
Bu proje verici bölümü ve alıcı bölümü içermektedir. gerekli bileşenler Bu projeyi inşa etmek için Ht12e, Ht12d, L293D, AT89S52, 7805, kondansatör, kristal, PBT konektörü, tek kutuplu anten, direnç, LED, ivmeölçer ve batarya bulunmaktadır. ivmeölçer bu projede önemli bir cihazdır.
ivmeölçer veya verici cihazı el hareketine bağlıdır. Verici cihaz aracılığı ile komut alınır ve At89S51 mikrodenetleyici yardımı ile işlenir. Bu mikrodenetleyici verir tercih edilen yönde hareket etmesi için robota sinyal. Bu robot setinin temel çalışma prensibi, cihaz okumalarını robota yerleştirilmiş mikro denetleyiciye ileten veri sinyalleri setidir. Önceden programlanmış mikrodenetleyici, robotun buna göre çalışmasını sağlayan programa göre çalışır.
İvmeölçer kullanan hareket kontrollü bir robot, üzerine bir ivmeölçer yerleştirilerek elin hareketiyle çalıştırılabilen bir tür robottur. Bu proje verici cihaz ve alıcı cihaz olmak üzere iki kısma ayrılmıştır. Bir hareket cihazının bir verici cihaz olarak çalıştığı ve bir robotun bir alıcı cihaz olarak çalıştığı durumlarda, bir verici cihaz (ivme ölçer) yandan yerleştirildiğinde, gerekli işlem için robota sinyaller gönderecektir.
İletim bölümünde kullanılan ana bileşenler arasında bir ivmeölçer, karşılaştırıcı, HT12E IC kodlayıcı ve RF verici .
İvmeölçer
Bir ivmeölçer birdir sensör tipi ve X, Y ve Z yönünde hareket ederken analog bir veri verir. Bu yönler sensör tipine bağlıdır. İvmeölçerin diyagramı aşağıda gösterilmiştir. Bu sensör ok yönlerinden oluşur, eğer sensörü bir yöne yatırırsak, o zaman belirli bir pimdeki veriler analog olarak değişecektir. İvmeölçer altı pimden oluşur, burada her bir pinin işlevi aşağıda tartışılmaktadır.

İvmeölçer
- Pin-1: VDD pini bu pime + 5V besleme vermek için kullanılır.
- Pin-2: GND pini, polarlama amacıyla toprağa bağlanır
- Pin-3: X pin verileri X yönünde alacaktır
- Pin-4: Y pini verileri Y yönünde alacaktır
- Pin-5: Z pin verileri Z yönünde alacaktır
- Pin-6: ST pini, ivmeölçerin 1.5g veya 2g veya 3g veya 4g hassasiyetini ayarlamak için kullanılır
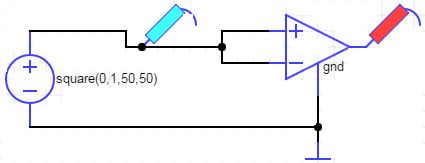
Karşılaştırıcı
Karşılaştırıcı, analog voltajı dijital voltaja dönüştürmek için kullanılır ve bu analog voltajı bir referans voltajla karşılaştırır ve hassas bir düşük voltaj veya yüksek voltaj verir.
Kodlayıcı
Bu kodlayıcı, 4 bitlik verileri kodlamak için kullanılır ve bir RF verici modülü kullanarak iletir.
RF Verici Modülü
RF TX modülü 433MHz frekans ile çalışır ve bu modül düşük maliyetle piyasada kolaylıkla bulunabilmektedir.
Alıcı bölümde kullanılan ana bileşenler, alıcı, kod çözücü, mikro denetleyici ve motor sürücüsünü içerir.

Verici Bölümü
RF Alıcı
Bu projenin RF alıcısı, verici cihaz tarafından aktarılan verileri alacaktır.
Kod çözücü
Kod çözücü, seri verileri RF alıcı modülünden alınan paralel verilere dönüştürmek için kullanılır.
Mikrodenetleyici
mikrodenetleyici en önemli kısımdır robotun. Devrede karar kapasitesi vermek için 8051 ailesi mikrodenetleyici kullanılmıştır.
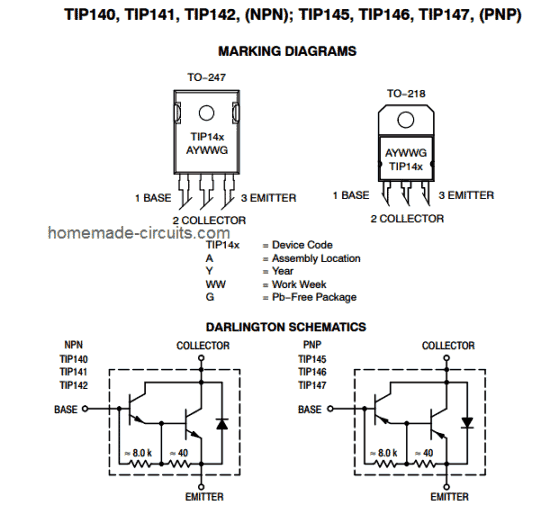
Motor sürücüsü
Motor sürücüsü, motor gibi bir görevi yerine getirme hareketi veren bir cihazdır. Bu yüzden motor sürücüsünün onları kontrolörden geçirmesine ihtiyacımız var. Motor ve mikro denetleyici arasındaki arayüz, bu devrede bir L293D motor sürücüsü IC kullanılarak yapılabilir.
Alıcı bölümünde, bir RF alıcı modülü vericiden verileri alır. Alınan verilerin kodu bir IC HT12D ile çözülebilir. Alınan veriler AT89S51 mikro denetleyici tarafından işlenebilir ve motoru kontrol etmek için motor sürücüsü kullanılır.

Alıcı Bölümü
Hareket Kontrol Robotu Çalışıyor
İvmeölçer tabanlı hareket kontrollü robot, ivmeölçeri elinize koyduğumuzda elin hareketine göre hareket eder. Elimizi robotun önünde bir ivmeölçerle eğdiğimizde, robot bir sonraki hareket verilene kadar ilerlemeye başlar. Elimizi geriye doğru eğdiğimizde, robot yönünü ve durumunu değiştirir. Ardından bir sonraki sinyal verilene kadar geriye doğru hareket etmeye başlar. Elimizi sol tarafa doğru eğdiğimizde, bir sonraki sinyal verilene kadar robot sol tarafa hareket eder, aynı şekilde elimizi sağ tarafa eğdiğimizde robot sağ tarafa hareket eder.
Uygulamalar
ivmeölçer uygulamaları tabanlı hareket kontrollü robot içerir
- Bu robotlar, robotları çalıştırmak için askeri uygulamalarda kullanılır.
- Bu robotlar tıbbi uygulamalarda ameliyat amaçlı kullanılmaktadır.
- Bu robotikler inşaat alanında kullanılmaktadır
- Bu robotikler endüstrilerde arabayı kontrol etmek ve kaldırmak için kullanılır.
Bu nedenle, bu tamamen İvmeölçer tabanlı hareket kontrol robotu, çalışması ve uygulamaları ile ilgilidir. Bu kavramı daha iyi anladığınızı umuyoruz. Ayrıca, bu konseptle ilgili herhangi bir şüpheniz veya elektronik projeler , lütfen aşağıdaki yorum bölümünde yorum yaparak geri bildiriminizi verin. İşte size bir soru, ivmeölçer tabanlı hareket kontrol robotunun uygulamaları nelerdir?
Fotoğrafa katkı verenler:
- İvmeölçer tabanlı Hareket Kontrol Robotu ytimg
- İvmeölçer static.flickr





{kind=link}
{kind=link}