Mesaj, motorun üzerindeki yükten bağımsız olarak tutarlı bir hızda çalışmasını sağlamak için sabit bir tork dengelemesine sahip bir DC Motor kontrol cihazını açıklar.
Sıradan Hız Kontrol Cihazlarının Dezavantajı
Çoğunluğunun bir dezavantajı basit hız kontrolörleri motora yalnızca önceden belirlenmiş sabit bir voltaj sağlarlar. Sonuç olarak, hız sabit kalmaz ve tork dengelemesinin olmaması nedeniyle motor üzerindeki yüke göre değişir.
Örneğin, basit kontrolörlü bir model trende trenin hızı, tırmanma eğimleri için kademeli olarak azalır ve yokuş aşağı giderken hızlanır.
Bu nedenle, model eğitmek için pot kontrol ayarını seçilen bir motor hızını sürdürmek için benzer şekilde motorun çekebileceği yüke bağlı olarak sapma gösterir.
Bu makalede açıklanan sabit tork motor hız kontrol devresi, motor üzerindeki yük ne olursa olsun, motor hızını izleyerek ve önceden belirlenmiş bir kontrol ayarı için sabit tutarak bu sorundan kurtulur.
Devre, DC sabit mıknatıslı motor kullanan modellerin çoğunda uygulanabilir.
Geri EMF Faktörünün Hesaplanması
Motor terminallerindeki voltaj birkaç faktörden oluşur, arka emf. motor tarafından üretildi ve voltaj armatür direncine düştü.
Arka emf. motor sargısı tarafından üretilen normal olarak motor hızıyla orantılıdır, bu da motor hızının bu geri emf içeriği ölçülerek izlenebileceği anlamına gelir. Ancak asıl mesele, arka emf'yi izole etmek ve tespit etmektir. armatür direnç voltajından.
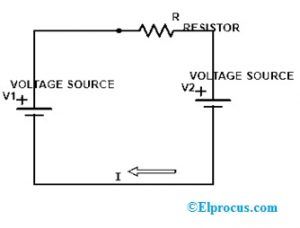
Ayrı bir direncin motora seri olarak bağlandığını varsayarsak, ortak tek bir akımın bu dirençten ve ayrıca armatür direncinden geçtiğini düşünürsek, iki seri direnç arasındaki voltaj düşüşü, armatür direncindeki düşüşe eşdeğer olabilir.
Aslında, bu iki direnç değeri aynı olduğunda, dirençlerin her birindeki iki voltaj büyüklüğünün de benzer olacağı varsayılabilir. Bu verilerle, R3'ün voltaj düşüşünü motor voltajından çıkarmak ve işlem için gerekli geri emf değerini almak mümkün olabilir.

Sabit Tork için Geri EMF İşleme
Önerilen devre, arka emf'yi sürekli olarak izler. ve buna göre, atanmış bir pot kontrol ayarı için, geri emf'nin motor hızı ile birlikte sabit bir torkta tutulmasını sağlamak için motor akımını düzenler.
Devre açıklamasını kolaylaştırmak için P2'nin ayarlandığı ve merkez konumunda tutulduğu varsayılır ve motor armatürünün direnç değerine eşdeğer olarak direnç R3 seçilir.
Motor Geriliminin Hesaplanması
Motor voltajı, geri emf eklenerek hesaplanabilir. Va, motor iç direnci Vr üzerinden düşen voltaj ile.
R3'ün bir Vr voltajını düşürdüğü düşünülürse, çıkış voltajı Vo Va + 2 V'a eşit olacaktır.
IC1'in ters çevirme girişindeki (-) voltaj Va + Vr olacak ve ters çevirmeyen girişteki (+) Vi + (Va + 2Vr - Vi) / 2 olacaktır.
Yukarıdaki iki voltaj büyüklüğünün eşit olması gerektiğinden, yukarıdaki denklemi şu şekilde düzenleriz:
Va + Vr = Vi + (Va + 2Vr - Vi) / 2
Bu denklemi basitleştirmek Va = Vi sağlar.
Yukarıdaki denklem, geri emf olduğunu gösterir. Motorun% 50'si sürekli olarak kontrol voltajı ile aynı seviyede tutulur. Bu, motorun P1 hız ayarının belirtilen herhangi bir ayarı için sabit bir hız ve torkla çalışmasını sağlar.
P2, R3 direnci ile armatür direnci arasında var olabilecek fark seviyesini telafi etmek için dahil edilmiştir. Bunu, ters çevirmeyen giriş op amp üzerindeki pozitif geri beslemenin büyüklüğünü ayarlayarak yürütür.
Op amp LM3140, temel olarak motor armatürü boyunca geliştirilen voltajı, motordaki geri emf eşdeğeri ile karşılaştırır ve T1 2N3055'in temel potansiyelini düzenler.
T1, bir yayıcı takipçisi motorun hızını temel potansiyeline göre düzenler. Op amp tarafından daha yüksek bir geri emf algılandığında motordaki voltajı artırır, bu da motor hızında bir artışa neden olur ve bunun tersi de geçerlidir.
T1, düzgün çalışması için uygun bir soğutucu üzerine monte edilmelidir.
Devre Nasıl Kurulur
Sabit tork motor hız kontrol devresinin kurulumu, motor, yükleme koşullarından bağımsız olarak sabit bir tork elde edene kadar değişen yüke sahip motorla P2'nin ayarlanmasıyla yapılır.
Devre model trenler için uygulandığında, P2'yi çok fazla P1'e doğru çevirmemeye dikkat edilmelidir, bu da model tren yavaşlamasına neden olabilir ve tersine P2 ters yönde çok fazla döndürülmemelidir, yokuş yukarı bir yokuş tırmanırken tren hızı aslında daha da artıyor.
Bir çift: Basit Ni-Cd Pil Şarj Devreleri Keşfedildi Sonraki: Mini Alıcı-Verici Devresi