Gönderi, mikrodenetleyici olmadan ve özel motor sürücü devreleri veya IC'ler kullanmadan robot devresinden kaçınan basit bir engeli açıklıyor. Fikir Bay Faiyyaz tarafından talep edildi
Dizayn
Temelde bir şeklinde hareketli araç Yolundaki olası engelleri tespit edip bunlardan kaçınabilen ve hareketinin kesintisiz kalması için yönünü uygun şekilde değiştirebilen, basit!
Bu nedenle operasyon, herhangi bir manuel veya insan müdahalesi olmaksızın otomatiktir.
Adından da anlaşılacağı gibi, mikrodenetleyicisiz bir engelden kaçınan robot fikri, bir mikro denetleyici kullanmaz ve bu nedenle inşa etmesi son derece basittir ve yeni hobiler için uygundur.
Devreyi tasarlarken, prensibi uygulamak için en az birkaç engel sensör modülünün gerekli olduğunu fark ettim, çünkü tek bir modül kullanmak motorun düzensiz hareketine neden olabilir ve aracın düzgün bir şekilde yön değiştirmesine veya doğru dönmesine yardımcı olmayabilir. özgür bir yol.
Araç motor kurulumu, uzaktan kumandalı oyuncak araba Daha önceki yazılardan birinde tartıştığım.
Aşağıdaki diyagram, sistemin modüllerinden birini temsil etmektedir ve bu nedenle, aracın sağ ve sol tarafları boyunca iki veya bir çift bu tür modül gerekecektir.
Fikir basittir ve mikrodenetleyici olmadan ve özel motor sürücü IC'leri olmadan çalışır. Bu, herhangi bir kodlama olmadan ve herhangi bir karmaşık motor sürücüsü IC kullanmadan yapabileceğiniz anlamına gelir ..... ve devre, gücünden bağımsız olarak herhangi bir DC motoru kullanmanıza izin verir, böylece araçlardan kaçan yüksek güç engelleri bile olabilir Normalde alışveriş merkezleri ve benzeri perakende satış noktalarında kullanılan bu devre kullanılarak yapılmıştır.
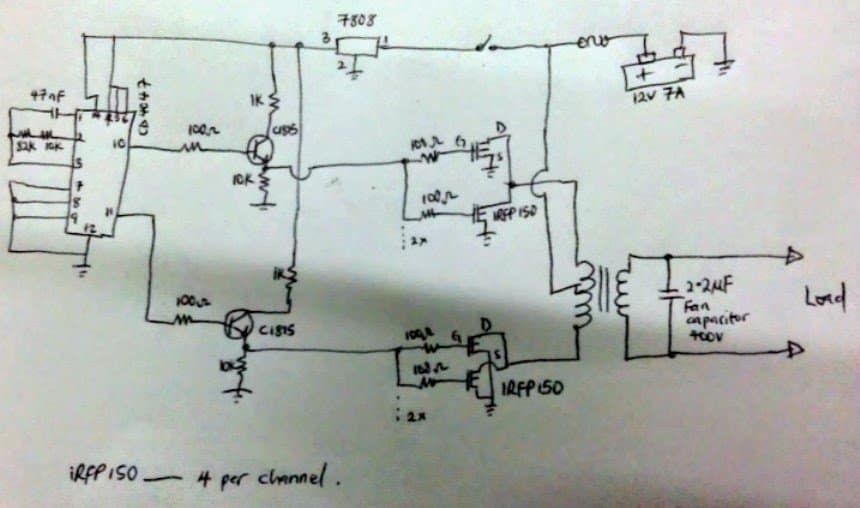
Devre şeması

Şimdi aşağıdaki açıklama yardımıyla yukarıdaki devreyi anlamaya çalışalım:
Nasıl çalışır
IC 555, bir IR vericisi olarak yapılandırılır ve sabit bir 38kHz frekans üretecek şekilde ayarlanırken, bitişik transistörlü devre, alıcı aşaması veya IR sensör aşaması olarak yapılandırılır.
Bunun sağ taraf modülü olduğunu varsayalım ve bu modülün yoldaki bir engeli ilk algılayan olduğunu varsayalım.
Bu nedenle, bir engel tespit edilir edilmez, 555 IC tarafından üretilen 38kHz frekans, bitişik alıcı devresinin sensörüne doğru yansıtılır.
Alıcı, ilgili transistörleri anında etkinleştirir, böylece son sürücü transistörün iletimi engellenir.
Şimdi bu transistör tarafından kontrol edilen motorun aracın sol tarafında, yani bu modülün karşı tarafında yer alması gerekiyor ... Benzer şekilde sağ tarafta bulunan motor da aslında sol taraf modülü tarafından kontrol ediliyor. .
Sonuç olarak, yukarıda farz edilen sağ taraftaki engel algılama modülü devreye girdiğinde, sol taraftaki motoru durdururken, sağ taraftaki motorun normal şekilde hareket etmesine izin verilir.
Bu durum, aracın sol tarafa yön değiştirmeye zorlanmasına neden olur ... bu, artık varsayılan sol modülün daha da güçlü engel sinyalleri almaya başladığı ve aracı, engelden tamamen kaçınana kadar devam eden sapmada daha sert ilerlemeye zorladığı anlamına gelir. . Modül artık engel sinyallerini almayı durdurur ve araç yeni yolunda normal şekilde ilerlemeye başlar.
Yukarıdaki yönlendirme gerçekleştirilirken, sol taraf modülü, prosedüre müdahale etme fırsatı bulamaması ve aracın temiz ve pürüzsüz bir şekilde yönlendirilmesine izin vermesi için giderek daha fazla izole ve engelden uzaklaşmaya zorlanır.
Sol taraftaki modülün sağ taraftaki modülün önündeki engeli algılaması durumunda tam olarak aynı prosedürler uygulanır, burada araç sağ tarafa doğru gittikçe daha sert hareket etmeye zorlanır.
Modülde sol ve sağ taraf modülleri arasında birbirine bağlanan bir 'devre dışı bırakma' devre aşaması da görebiliriz. Bu aşama, her iki modülün hiçbir zaman birlikte etkinleştirilmemesini sağlamak için bilerek başlatılır.
Bu nedenle, örneğin, sol taraf modülü bir engeli ilk algılayan olursa, hemen sağ taraftaki modülü devre dışı bırakır ve sağda aracın yönünü değiştirmeyi başlatır ve bunun tersi de geçerlidir.
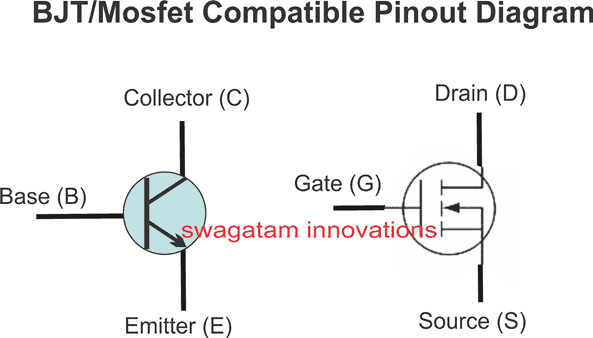
Sensör IC'si bir standart TSOP17XX serisi
Yukarıdaki sensör IC ile ilgili daha fazla bilgi için öğrenebilirsiniz TSOP1738 IC nasıl bağlanır
Ve motor, hareketin orijinal olarak kontrollü bir seviyede tutulması için dişli kutuları ile donatılmalıdır.
Tekerlek Kurulumu
Sol ve sağ modülün tam kurulumu ve ilgili elektrik bağlantıları aşağıdaki şekilde görülebilir:

Güncelleme
Biraz düşünmek bize, robot devresinden kaçınan yukarıdaki basit engelin ikisi yerine tek bir modül kullanılarak da uygulanabileceğini söylüyor.
Bununla birlikte, tek bir modül, aracın bir engeli her algıladığında tek taraflı bir yönlendirme yapmasına izin verir, bu nedenle sistem, eylemler için devreye hangi motorun bağlı olduğuna bağlı olarak saat yönünde veya saatin tersi yönde sapma alacak şekilde yapılandırılabilir.
Örnek kurulum aşağıdaki görüntüde görselleştirilebilir:

Ancak, yukarıdaki tek motor kurulumunda bir sorun var gibi görünüyor. Aracın sol tarafında dik açılı bir köşeyle karşılaştığını varsayalım. Bu, aracı bir U dönüşü alana kadar saat yönünün tersine hareket etmeye zorlar ve başladığı yerden aynı yöne doğru geri hareket etmeye başlar. Bu, kullanıcının beğeneceği bir şey değil.
Önceki: SMD Dirençleri - Giriş ve Çalışma Sonraki: İvme Ölçer Nasıl Çalışır?