Bu yazıda, alüminyum borular ve cıvatalar kullanılarak quadcopter gövde montajının temellerini tartışacağız, makalenin sonraki bölümlerinde, karmaşık mikrodenetleyicilere bağlı kalmadan küçük bir drone düzeneğini uçurmak için kullanılabilecek basit bir drone devresini de tartışacağız.
Bir quadcopter, belki de minimum miktarda aerodinamik doğruluk ve komplikasyon gerektiren en basit uçan makinedir ve bu nedenle şaşırtıcı değil, bunu başarıyla inşa edebilen çeşitli hobiler arasında büyük bir popülerlik kazanabilir ... aslında uçabilecekleri bir makine ve kendi iradeleriyle kontrol.
Quadcopter Dinamikleri
Quadcopter drone'nun teknik ve dinamik açıdan en basit olduğu gerçeği, aslında 4 pervanenin katılımı ve makinenin zorlu iklim koşullarında bile nispeten iyi bir denge ile uçmasını sağlayan dengeli bir çerçeve yapısından kaynaklanmaktadır.
Ancak basitlik, sistemin hız ve yakıt tüketimi ve tabii ki yük taşıma kapasitesi açısından son derece karmaşık bir şekilde tasarlanmış olan geleneksel uçak ve helikopter modelleri kadar verimli olmayabileceği anlamına da gelir ... bunların tümü esasen olabilir. tipik bir quadcopter sisteminde eksik.
Bununla birlikte, bir hobi projesi söz konusu olduğunda, bu makine evde kendi başına bir uçan makine yapmayı çok eğlenceli ve merak uyandırıcı bulan ve nihayetinde 'dinleyen' ve hangi yöne doğru uçabilen çoğu meraklı için ideal bir seçim haline geliyor. kullanıcı hareket etmeyi tercih ediyor.
Bununla birlikte, teknik olarak bu kadar bilgili olmayan yeni bir oyuncu için, bu basit makineyi bile anlamak son derece karmaşık bulabilir, çünkü birçok web sitesinde sunulan ilgili bilgilerin çoğu, kavramı net bir şekilde ve bir 'dilde' tartışmakta başarısız olur. meslekten olmayan bir adama uygun olabilir.
Bu makale, muhteşem bir uçan makine yapmakla ilgilenen, ancak konuyu sindirmesi çok zor bulan, teknik açıdan çok fazla olmayan kişiler için özel olarak yazılmıştır.
Quadcopters'ı Bugün Oluşturmak Neden Bu Kadar Kolay?
Quadcopters ve drone'ların günümüz dünyasında neden bu kadar kolay inşa edildiğini ve belki de daha önce elektrik kullanımının imkansız olduğunu hiç merak ettiniz mi?
Temel olarak Li-Ion Pillerin geliştirilmesi ve iyileştirilmesinden kaynaklanmaktadır. Bunlar, günümüzde mevcut olan ve etkileyici güç / ağırlık oranı sunan son derece verimli pillerdir. Bununla birlikte, BLDC motorların ve son derece rafine edilmiş sabit mıknatıslı motorların icadı, dronların kolayca inşa edilebilir hale gelmesine de katkıda bulunmuştur.
Li-Ion batarya, dört pervaneli helikopter ünitesini saniyeler içinde yerden yüksek bir rakıma itmek için yeterli hale gelen ve ayrıca uzun bir süre boyunca havada kalmasına izin veren, motorlar üzerinde müthiş miktarda dönme torku sağlayabilir. performans çok verimli ve kullanışlı.
Quadcopter Nasıl Uçar
Şimdi doğru yoldan atlayalım ve bir quadcopter'ın başarılı bir şekilde uçmasını sağlamak için gerekli olan temel şeylerin ne olduğunu anlayalım. Makinenin sorunsuz bir şekilde uçmasını sağlamanın temelleri şunlardır:


1) Temel olarak makine sağlam ve güçlü bir gövde gerektirir, ancak son derece hafiftir. Bu, içi boş kare alüminyum ekstrüzyon borular kullanılarak, uygun şekilde delikler açılarak ve çerçeve somun ve cıvatalarla sabitlenerek imal edilebilir veya monte edilebilir.
2) Yapı, mükemmel '+' veya mükemmel 'x' şeklinde olmalıdır, 'geçiş' boruları arasındaki açı 90 derece olduğu sürece bir fark yaratmaz.

Bir quadcopter inşa etmek için gerekli temel unsurlar aşağıdaki görüntüde görülebilir:

Parça Montaj Simülasyonu
Aşağıdaki kaba animasyonlu simülasyon, yukarıda gösterilen öğelerin nasıl bir araya getirileceğini gösterir:

Quadcopter Çerçevesi Nasıl Oluşturulur
'+' Çerçeve için alüminyum, aşağıda gösterildiği gibi hazır alüminyum ekstrüzyon borularının uygun şekilde kesilmesi ve boyutlandırılmasıyla elde edilebilir:

Şasinin boyutu görecelidir ve bu nedenle çok önemli değildir, motorlar birbirinden ayrı olarak yerleştirilmiş geniş bir çerçeve oluşturabilir veya motorların çok geniş olmadığı oldukça kompakt bir çerçeve yapısı oluşturabilirsiniz ... Daha iyi denge ve denge sağlamak için pervaneler birbirinden oldukça uzaktır.
3) '+' çerçeve yapısına, çerçeve kollarının buluştuğu ve birbirini kesiştiği orta bölümde kare bir platform takılmalıdır. Basitçe, tüm gerekli elektronik ve kabloları rahatça barındırmak için uygun şekilde boyutlandırılmış, iyi cilalanmış bir alüminyum plaka olabilir.
Bu nedenle, bu merkezi plaka veya platform, temel olarak, quadcopter'inizi kontrol etmekten nihai olarak sorumlu olacak olan sistemin elektroniklerini kurmak ve barındırmak için gereklidir.
4) Yukarıdaki çerçeve tamamlandığında, motorların yukarıdaki şekillerde gösterildiği gibi çapraz çubukların uçlarına sabitlenmesi gerekir.
5) Tüm montaj işinin en yüksek doğruluk ve mükemmel hizalama ile yapılması gerektiğini söylemeye gerek yok, bu iş için deneyimli bir imalatçının birlikteliğini gerektirebilir.
Tasarımdaki her şey çiftler halinde olduğundan, öğeleri doğru bir şekilde hizalamak aslında çok zor olmayacak, sadece çiftleri olabildiğince çok benzerlikle boyutlandırmak ve uydurmakla ilgilidir, bu da maksimum düzeyde denge, denge ve senkronizasyon sağlayacaktır. sistem için.
Çerçeve oluşturulduktan sonra, elektronik devreleri ilgili motorlarla entegre etme zamanı. Bunun, verilen devre kılavuzunda sağlanan talimatlara göre yapılması gerekecektir.
Devre kartları, merkezi plakanın alt tarafına, uygun şekilde muhafaza edilerek veya plakanın üzerine, yine sıkıca kapatılması için uygun bir kabinle takılabilir.

Pervanelerin Dönüş Yönünü Anlamak
Dengeli Kaldırma için Motor pervanelerinin Dönüş Yönünün Analizi:
Yukarıdaki animasyonlu simülasyona istinaden, motor pervanelerinin dönüş yönü aşağıdaki şekilde hizalanmalıdır:
Basitçe, bir çubuğun uçlarındaki motorların aynı, ancak diğer çubuk motor yönünden farklı olması gerekir, yani bir çubuğun motorları saat yönünde dönüyorsa, diğerinin uçlarındaki motorlar tamamlayıcıdır. çubuk saat yönünün tersine dönecek şekilde ayarlanmalıdır. yön.
Dengeli bir alım sağlamak için motorlara atanması gerekebilecek karşı etkili motor hareketini doğru anlamak için lütfen yukarıdaki simülasyona bakın.
Motorların hızını kontrol ederek quadcopter'ın yönü nasıl kontrol edilir.
Evet, quadcopter'in uçuş yönü, kendi isteğinize göre ayarlanabilir ve kontrol edilebilir ve ilgili motorlara farklı hızlar (RPM'ler) uygulayarak yapılır.
Aşağıdaki resimler, makineye istenen herhangi bir uçuş yönünü elde etmek ve yürütmek için temel hız aktarımının ilgili motorlara nasıl uygulanabileceğini göstermektedir:




Yukarıdaki diyagramlarda belirtildiği gibi, bir motor setinin hızını uygun şekilde azaltarak veya zıt motor setinin hızını artırarak veya hızları kendi tercihinize göre ayarlayarak quadcopter herhangi bir yerde havada seyahat etmek üzere yapılabilir. istenen özel yön.
Yukarıdaki resimler, ileri, geri, sağ, sol vb. Gibi temel yönleri göstermektedir ... bununla birlikte, diğer herhangi bir tek yön, ilgili motorların hızlarının uygun şekilde ayarlanmasıyla verimli bir şekilde uygulanabilir veya sadece tek bir motor olabilir.
Örneğin makineyi N / W yönüne uçmaya zorlamak için, sadece S / E motorunun hızı artırılabilir ve makinenin N / E yönünde uçmasını sağlamak için S / E W motor artırılabilir ... vb. Quadcopter'ın tam kontrolü elde edilebilir hale gelene ve kullanıcı tarafından yönetilene kadar sadece uygulanması gerekir.
Pratik Bir Quadcopter Tasarlamak
Şimdiye kadar drone gövdesinin ve donanımının temel yapısını öğrendik, şimdi çok sıradan bileşenleri kullanarak hızlı ve ucuz bir şekilde bir quadcopter veya drone devresinin nasıl yapılacağını öğrenelim. Daha önceki gönderilerimden birinde, mikrodenetleyici kullanmadan nispeten karmaşık ve dolayısıyla verimli bir quadcopter uçan makinenin nasıl yapılacağını öğrendik, daha fazla bilgi için aşağıdaki gönderileri gözden geçirmek isteyebilirsiniz:
MCU'suz Uzaktan Kumanda Devresi | Elektronik devre
Bu yazıda, yukarıdaki tasarımı fırçasız motorları ortadan kaldırarak ve fırçalı motorlarla değiştirerek çok daha basit hale getirmeye çalışıyoruz ve sonuç olarak kompleksten kurtulmayı mümkün kılıyoruz. BLDC sürücü devre modülü .
Quadcopter'ın mekanik konstrüksiyon detayları yukarıda kapsamlı bir şekilde tartışıldığından, sadece devre tasarımı bölümü ile ilgileneceğiz ve önerilen en basit drone devresini uçurmak için nasıl inşa edilebileceğini öğreneceğiz.
Daha önce belirtildiği gibi bu basit quadcopter, aşağıdaki örnek resimde gösterildiği gibi yalnızca temel RF uzaktan kumanda modüllerini gerektirir:

İhtiyacın olacak bu RF modüllerini satın alın herhangi bir çevrimiçi mağazadan veya yerel elektronik yedek bayinizden:
Yukarıda belirtilenlerin dışında RF uzaktan kumanda modülleri Drone makinesinin kalbini oluşturan 4 kalıcı mıknatıslı fırçalanmış motor da gerekli olacaktır. Verilen açıklamalarla aşağıdaki resimde belirtildiği gibi veya gerekli kullanıcı spesifikasyonlarına göre herhangi bir benzer olabilir:

Motorun Elektriksel Özellikleri:
- 6V = çalışma voltajı (en yüksek 12V)
- 200mA = çalışma akımı
- 10.000 = RPM
Parça listesi
- 1K, 10K 1/4 watt = her biri 1
- 1uF / 25V Kapasitör = 1no
- Ön ayarlı 10K veya 5K = 1no
- Rx = 5 watt tel sargılı direnç, deneyle teyit edilecek değer.
- IC 555 = 1 hayır
- 1N4148 Diyotlar = 2nos
- IRF9540 Mosfet = 1 no
- 6V Motor Fırçalı Tip = 4nos
- Esnek teller, lehim, akı vb.
- Yukarıdaki parçaların montajı için genel amaçlı PCB
- 4 Kanallı RF Uzaktan Kumanda Modülü, ilgili görsellerde gösterildiği gibi.
- Alüminyum Kanallar, vidalar, somunlar, plakalar vb. Yazıda anlatıldığı gibi.
- Aşağıda gösterildiği gibi pil:

Uzaktan Kumanda Alıcısını Motorlarla Yapılandırma
Uzaktan kumanda alıcısının dört pervaneli motorlarla nasıl yapılandırılacağını anlamadan önce, gerekli sola, sağa, ileri, geri hareketleri oluşturmak için motor hızlarının nasıl ayarlanacağını veya hizalandığını öğrenmek önemli olacaktır.
Öncelikle bir quadcopter'ın hareket etmesini sağlayan iki yol vardır, bunlar '+' ve 'x'modlarındadır. Tasarımımızda, aşağıdaki diyagramda belirtildiği gibi, drone'umuz için temel '+' hareket modunu kullanıyoruz:

Yukarıdaki diyagrama başvurarak, drone üzerinde istenen yön manevralarını gerçekleştirmek için ilgili motorların hızlarını uygun şekilde artırmamız gerektiğini anlıyoruz.
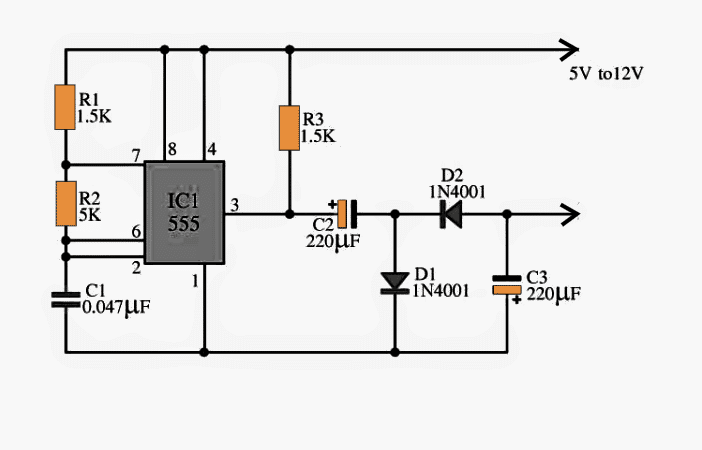
Bu hız artışı, uzaktan kumanda röleleri aşağıdaki bağlantı şemasına göre yapılandırılarak sağlanabilir. Aşağıdaki diyagramda bir IC 555 PWM devresi 6 rölenin uzaktan kumanda alıcı modülünün 4 rölesi ile kablolanmıştır (1 röle kullanılmamaktadır ve alan ve ağırlığı azaltmak için kolayca çıkarılabilir).
PWM'yi Ayarlama
Diyagramda görülebileceği gibi, PWM beslemesi, rölelerin tüm N / C kontaklarıyla bağlantılıdır; bu, normalde dörtlü pervanenin bu tek tip ve eşit PWM beslemesinde gezineceği anlamına gelir; quadcopter, belirtilen doğru miktarda itme ve irtifa elde edebilir.
Bu, gösterilen PWM potu uygun şekilde ayarlanarak deneylenebilir.
Aktarma Kontaklarını Yapılandırma
Rölelerin N / O kontakları, pozitif besleme ile doğrudan kablolanmış olarak görülebilir, böylece uzak verici el cihazında ilgili bir düğmeye basıldığında, alıcı modülünde ilgili röle etkinleştirilir ve bu da ilgili motorun almasını sağlar. aküden tam 12V besleme.
Yukarıdaki işlem, çalıştırılan motorun, quadcopter'ın öngörülen yöne doğru hareket etmesine izin veren motorların geri kalanından daha fazla hız kazanmasına izin verir.
Uzaktan kumanda düğmesi bırakılır bırakılmaz, drone anında durur ve sabit modda gezinmeye devam eder.
Aynı şekilde, uzak ahizede atanmış diğer düğmelere basılarak başka yön hareketleri de gerçekleştirilebilir.
En üstteki röle, makinenin güvenli bir şekilde inmesini sağlamak içindir, bu, gösterilen rölenin N / O kontağına seri olarak bir akım düşürme direnci eklenerek yapılır.
Bu direnç değeri, bu direnç bağlı röle aracılığıyla değiştirildiğinde, dört pervaneli helikopterin yerden birkaç fit yukarıda olacak şekilde bazı deneylerle hesaplanmalıdır.
Devre şeması

Gösterilen röleler, kontakları başlangıçta bağlı olmayan (varsayılan olarak boş) ve yukarıdaki şemada gösterildiği gibi kablolanması gereken RF modül alıcısının bir parçasıdır.
RF uzaktan alıcının, quadcopter içine monte edilmesi ve röleleri, yukarıda gösterilen düzene göre ilgili motorlar ve batarya ile bağlanmalıdır.
Drona gereksiz yere ağırlık ekleyebilecek birkaç konektör (yeşil renkli) görebilirsiniz. Ağırlığı azaltmak için hepsini kaldırabilir ve ilgili kabloları lehimleyerek doğrudan PCB'ye bağlayabilirsiniz.
Drone Nasıl Hareket Eder:
Yukarıdaki tartışmada açıklandığı gibi, belirli bir uzaktan kumanda düğmesine basıldığında, dört pervaneli modülün ilgili rölesini harekete geçirerek ilgili motorun daha hızlı hareket etmesine neden olur.
Bu işlem sırayla makineyi, daha hızlı RPM'de dönmesi için değiştirilen motora ters yönde hareket etmeye zorlar.
Böylece örneğin güney motorunun hızının arttırılması makinenin kuzeye doğru hareket etmesine, kuzey motorunun artması da güneye hareket etmesine neden olurken, benzer şekilde doğu motor hızının artması batıya doğru hareket etmesine ve tersi yönde hareket etmesine neden olur.
İlginç bir şekilde, güney / doğu motorlarının artırılması, quadcopter'ın çapraz moddaki zıt kuzeye / batıya doğru hareket etmesini sağlar .... vb.
Yukarıda açıklanan Basit Qaudcopter uzaktan kumanda devresinin Artıları ve Eksileri.
Artıları
- Ucuz ve nispeten yeni bir hobisi tarafından bile inşa edilmesi kolaydır.
- Karmaşık joystick işlemleri gerektirmez.
- 6 kanallı tek bir uzaktan kumanda modülü kullanılarak kontrol edilebilir
Eksileri
- Fırçalanmış motorların dahil olması nedeniyle pil yedeklemesi açısından daha az verimli
- Yön hızı sabittir ve uzaktan kumanda ahizesi ile değiştirilemez
- Düğmeleri değiştirirken manevra yapmak biraz sarsıntılı olabilir.
Önceki: Kuvvet Algılama Direnci Açıklaması Sonraki: Kapasitif Gerilim Bölücü