Bu yazıda, tercih edilen bir dizi hareketle bir inkübatör motor mekanizmasını çalıştırmak için bir ileri geri zamanlayıcı devresi öğreniyoruz. Fikir, Bay Anwar tarafından talep edildi
Teknik özellikler
Endonezya'lıyım ..... Yüksek Tork Motorlu İnkübatör Zamanlayıcısı İçin Şemalara İhtiyacım Var (Arabada DC Motor Gücü Penceresi). Bir DC motorun son konuma gelene kadar iki yönde çalışmasını sağlamaya çalışıyorum, ardından gücü yeniden uygulandığında diğer yönde çalışacak şekilde polariteyi durdurup değiştiriyorum. Öyleyse diğer tarafta da aynı şeyi yapın.
1. zamanlayıcı 1 dakika süreyle gücü açar. (07:00 - 07:00)
2. motor durma konumuna gelene kadar tek yönde çalışır, örneğin 30 saniye.
3. Durma konumuna geldiğinde motora giden güç kapanır ve 1 dakika gecikir. ana gücü sonlandırmak / kapatmak için zamanlayıcı. ayrıca polariteyi tersine çevirir, böylece.
4. bir dahaki sefere ana zamanlayıcı açıldığında (10: 00-10: 01) aynı şeyi ters yönde dozlar ve sürekli tekrar eder
5. 12 VDC Motor Ters (Motor + ve --'den sadece iki kablo)
6. Rev / Fwd motor için Led Göstergesi Gerekiyor
Bana yardım edebilir misiniz efendim?
Herhangi bir yardım için şimdiden teşekkür ederim.
Bu,% 100 güvenilir olması gereken önemli bir ev projesidir.
Dizayn

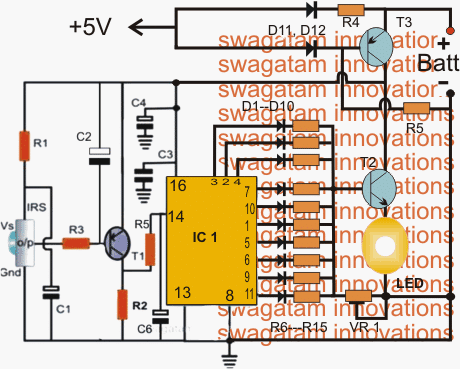
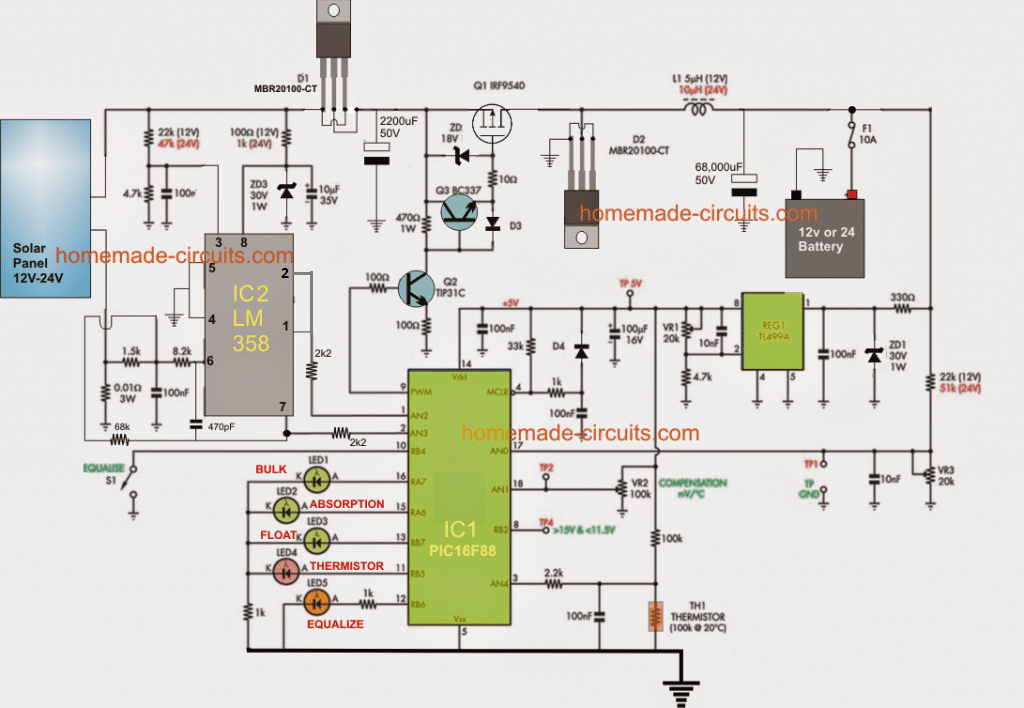
Yukarıdaki şekilde, önceden belirlenmiş bir zaman aralığından sonra bir inkübatör motorunun önerilen geri ileri hareketini uygulamak için bir tasarımı görselleştirebiliriz.
Güç AÇIK konuma getirildiği anda aşağıdaki senaryoya sahibiz:
'Ayar' için manyetik anahtarın, motor veya tasarlanan inkübatör mekanizması sıfır başlangıç pozisyonundayken devre dışı bırakılmış veya basılı durumda olduğu varsayılabilir.
Lütfen 'set' / 'reset' anahtarlarının manyetik dilli anahtarlar kullanılarak uygulanması gerektiğine dikkat edin.
Güç AÇIK konuma getirildiğinde, IC 4060, sıfırdan sayma işlemini başlatması için C2 aracılığıyla sıfırlanır ve pin3, sıfır mantığı haline getirilir.
Bu ilk sıfır mantığı, anında T3'ü ve ilgili rölesini etkinleştirmeye zorlayan T1'in tabanına C3 yoluyla beslenir. İşlemdeki R7, T1 / T3'ün bu modda kilitlenmesini sağlar.
Bu noktada DPDT rölesi, motoru ve mekanizmayı varsayılan bir 'ileri' harekete doğru başlatan N / O kontaklarında harekete geçer.
Motor hareket etmeye başlar başlamaz, 'set' düğmesi serbest bırakılır, böylece T4 ve üst SPDT harekete geçme fırsatı yakalar, burada SPDT rölesi, DPDT'nin N / C kontaklarını bir bekleme ile gerçekleştiren bir N / O konum değiştirme elde eder. arz..
Motor ve / veya mekanizma, T2'nin T1 / T4 mandalını etkinleştirmesine ve kırmasına neden olan 'sıfırlama' konumuna ulaşana kadar hareket etmeye devam eder.
T4 KAPALI konumdayken, DPDT rölesi konumunu N / O'dan N / C'ye değiştirir ve motor mekanizmasına ters (ters) bir hareket sağlar.
İnkübatör motor mekanizması artık yönünü döndürür ve T4'ün temel sürücüsünü hızlı bir şekilde KAPATAN 'ayar' noktasına ulaşana kadar bir ters hareket başlatır, SPDT, DPDT'nin kesme gücünü KAPALI konuma getirir ve tüm mekanizma hareketsiz kalır. .
Bu arada, IC 4060, pin3'te yüksek bir mantıktan geçtikten sonra (C3'ü boşaltarak) tekrar sıfır mantık üretene kadar saymaya devam eder.
Döngü bir kez daha başlar ve yukarıda açıklandığı gibi prosedürü tekrar eder.
Önceki: Arduino ile bir LED'in yanıp sönmesi - Tam Eğitim Sonraki: Yüksek Güçlü Endüstriyel Şebeke Aşırı Gerilim Bastırıcı Keşfedildi