Gönderi, kullanıcı tarafından verilen uzak ahizeyi kullanarak gerektiğinde sola, sağa, ileri ve geri manevra yapabilen ucuz ama güçlü bir uzaktan kumandalı arabanın nasıl yapılacağını açıklıyor. Fikir bir mikrodenetleyici devresine dayanmıyor.
Önceki gönderilerimden birinde bir basit uzaktan kumandalı oyuncak araba devresi Şu andaki uzaktan kumandalı araba fikri de aynı konseptten esinlenilmiş ancak zorlu ve çok daha ağır yükleri taşımak için kullanılması amaçlanmıştır.
Perakende Satış Noktaları için Uzaktan Kumandalı Araba
Bu tasarım, uzak Tx ünitesinin birkaç presinin yardımı ile bileşik veya bina içinde malzeme taşımak için küçük bir nakliye aracı olarak uygulanabileceği alışveriş merkezleri veya alışveriş perakende satış yerleri için özel olarak uygun ve uygulanabilir olabilir.
Önerilen uzaktan kumandalı arabayı oluşturmanın ilk adımı, yerel elektronik bayinizden veya herhangi bir çevrimiçi mağazadan bir dizi standart Rx / Tx RF modülü satın almak olacaktır, çok daha kolay ve rahat olacağı için bir çevrimiçi mağazadan satın almanızı tavsiye ederim. daha pahalı olmasına rağmen.
Tedarik edilen birimler aşağıda gösterildiği gibi görünecektir:
433MHz Tx, Rx Modüllerini Kullanma

Sol taraftaki kahverengi renk birimi Tx veya verici birimidir, bitişik devre geniş ise Rx veya alıcı birimidir.
Tx ünitesi A, B, C, D olarak işaretlenmiş 4 kırmızı renkli düğme ile görülebilir ve Rx kartının 4 rölesi (siyah renkli kutular) olduğu görülebilir.
Tx modülünün dört ilgili düğmesi, Rx modülünün dört karşılık gelen rölesini çalıştırmak için kablosuz olarak bağlanmıştır.
Kartın kenarlarına sabitlenmiş konektörleri (yeşil renkli) görebilirsiniz, bu konektörler Rx kartı için (+) (-) besleme girişleriyle ve ayrıca 4 rölenin tümü için röle kontaklarıyla uygun şekilde sonlandırılır.
Bir röle, hepimizin bildiği gibi 5 temel kontaktan ve bunların pin çıkışlarından oluşur: bobin için 2 pim, biri kutup için ve biri N / C ve N / O için.
Rx ünitesinde 4 röle olduğundan, ilgili konektör noktaları ile ilişkili 5 x 4 = 20 çıkış bulabileceksiniz.
Konektörlerdeki bu röle sonlandırmalarını ayrı ayrı izlemek yorucu bir görev olabilir, bu nedenle yukarıdaki görevden kendinizi kurtarmak için kabloları doğrudan röle pin çıkışlarına lehimlemenizi tavsiye ederim, bu çaba daha sonra üniteyle meşgul olurken gerekli olacaktır. trolley'in kontrol devresi.
Araba için röle kontrol devresinin oluşturulması
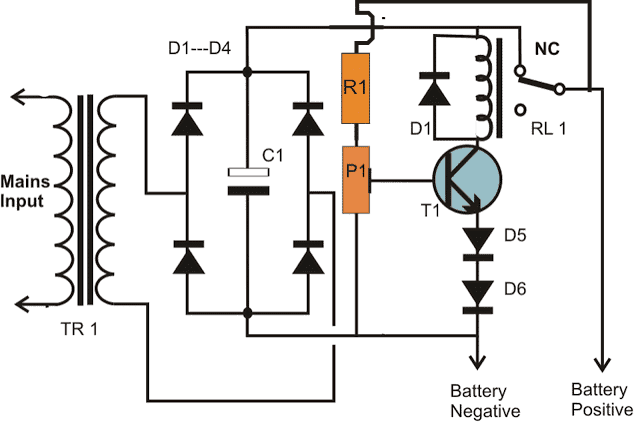
Bunun için bir avuç röle ve diyota ihtiyacınız olacak. Arabanın yüksek güçlü tekerlekli motorlarını kullanabilmek için röleler doğru derecelendirilmelidir. Bunun için OEN make rölelerini aşağıdaki resimde gösterildiği gibi kullanmanızı tavsiye ederim:

Röle sürücü devresinde ihtiyaç duyulacak diyotlar standart 1N4007 diyotlarımız olabilir.
Aynı devre detayları aşağıdaki şemada görülebilir:
Röle Kablolama Detayları ve Şeması


Uzak Troley Devresi Nasıl Çalışır?
Yukarıda belirtilen röleleri ve diyotları kullanarak, yukarıdaki röle sürücü devre kartını oluşturmayı bitirmeniz gerekecektir; bu, basitçe bir veroboard parçası üzerinde yapılabilir.
Bundan sonra, yukarıdaki şemada gösterilen yeşil kabloları uzaktan kumanda Rx kartı ile entegre etmek olan büyük bir görevimiz var.
Entegrasyondan önce, aşağıda açıklandığı gibi Rx modülüne bazı modlar eklememiz gerekecek:
Uçlarında uygun şekilde sıyrılmış ve kalaylanmış yalıtılmış tel parçaları kullanarak, rölenin tüm kutup pimlerini birleştirmeye (lehimleyerek) ve bu ortak eklemi Rx kartının pozitif hattına bağlar.
Şimdi bu durumda, röleler etkin durumda olmadığında (uzak ahize aracılığıyla) her bir rölenin kutup pozitif girişinin ilgili N / C noktalarına bağlanacağını ve etkinleştirildiğinde kutuptan pozitifin olacağını varsayabiliriz. ilgili N / O noktalarına geçiş yapın ve bağlantı kurun.
Kısaca, aktivasyon sırasında N / O kontağı pozitif beslemeyi alacaktır ve bu nedenle N / O kontaklarından gelen bu pozitif beslemeyle ilgileniyoruz çünkü bunlar yalnızca röleler etkinleştirildiğinde başlatılacaktır, bu da Tx (verici ) düğmelerine basılır.
Bu nedenle, tüm ilgili N / O pin çıkışları, yukarıda belirtilen röle sürücü devresinin yeşil kablolarına bağlanmalıdır.
Bu yapıldıktan sonra, Rx, uzaktan kumandalı arabanın amaçlanan tüm manevralarını, yani ileri, geri, hareketleri ve sola, sağa dönüşleri gerçekleştirmek için röle sürücü modülü ile entegre edilecektir.
Röle Sürücü Kartına güç verilmesi
Röle sürücü aşamasındaki röleler, araba tekerleğine bağlı ağır motorları hareket ettirmekten sorumlu olacağından, bunun için beslemenin eşit derecede güçlü olması gerekir, bu nedenle derin döngülü kurşun asit bataryalar bu uygulama için ideal olarak uygun hale gelir.
Motorların 12V olarak derecelendirildiği varsayıldığında, 40AH kurşun asit batarya, arabanın daha ağır yüklerde bile hareket etmesini sağlamak için yeterince iyi olacaktır.
İstenen manevralar için Tekerlekleri Motorlarla Yapılandırma
Aşağıdaki şekilde tanımlanabileceği gibi, tartışılan uzaktan kumandalı araba, sistemin taşınması ve yuvarlanması için 4 tekerlek gerektirecektir.
Bununla birlikte, amaçlanan geri, ileri, sağ ve sol manevraları sağlamaktan yalnızca ön iki tekerlek sorumlu olacak ve bu nedenle motorların, aşağıdaki resimde gösterildiği gibi, arabanın bu iki ön tekerleği ile kelepçelenmesi gerekecektir:

El Arabası Tekerleği Bağlantılarını Yapılandırma
Arka tekerlekler, ön tekerlek komutlarına yanıt olarak yalnızca arabanın serbestçe yuvarlanmasına izin vermek için sabitlenen sahte tekerleklerdir.
Yukarıdaki görüntüde görülebileceği gibi, PCB düzeneği olarak işaretlenen modül röle sürücü kartıdır, uzak modül Rx uzak alıcı kartını belirtirken, pil, makalenin önceki bölümünde tartıştığımız 40 AH 12V pildir.
Montajdan sonra motor kablo bağlantılarını röle sürücü panosu ile ayarlamanız ve kontrol etmeniz gerekebilir.
İleri ve geri hareket için her iki motor da birbiriyle senkronize olmalıdır, diğer yandan sağa veya sola dönüş yapmak için motorlar ters dönüş hareketinden geçmelidir.
Motorun yukarıdaki şekilde davranmadığını tespit ederseniz, büyük olasılıkla motorlardan birinin polaritesini değiştirerek düzeltilebilir. Bu, durumu derhal düzeltecek ve motorları belirtilen manevraları uygulamaya zorlayacaktır.
Son olarak, A, B, C, D düğmeleri, kullanıcının kişisel tercihine göre, Rx modülü ile yeşil kablo bağlantılarının ayarlanmasıyla ilgili manevraların herhangi biri için uygun şekilde eşleştirilebilir veya değiştirilebilir.
Önceki: Ayarlanabilir Akım ve Gerilim Çıkışı için SMPS Nasıl Değiştirilir Sonraki: Mikrodalga Sensörü veya Doppler Sensör Devresi