

Endüstriyel Otomasyon ve Kontrol
Şu günlerde endüstriyel otomasyon sistemleri endüstrilerin çoğunda popüler hale geldi ve süreçle ilgili birkaç işlemin kontrolünde önemli bir rol oynadı. Fabrika veya endüstri üzerinde coğrafi dağılımlarıyla çok çeşitli endüstriyel ağların uygulanması nedeniyle, kat veri aktarımı ve kontrol yeteneği, düşük seviyeden yüksek seviyeli kontrole kadar daha karmaşık ve kolay hale geldi. Bu endüstriyel ağlar, CAN protokolü, Profibus, Modbus, Cihaz ağı vb. Gibi çeşitli iletişim standartlarını kullanan çeşitli alan veri yollarıyla yönlendirilir. O halde, CAN iletişiminin endüstrileri ve diğerlerini otomatikleştirmek için nasıl çalıştığına bakalım. otomasyona dayalı sistemler .
Endüstriyel Otomasyon ve Kontrole Giriş
Aşağıdaki şekil, tüm sistemi otomatikleştirmek için üç kontrol seviyesinin gerçekleştirildiği endüstriyel otomasyon ve kontrol mimarisini göstermektedir. Bu üç seviye, kontrol ve otomasyon, proses kontrolü ve daha yüksek seviyeli kontroldür. Kontrol ve Otomasyon seviyesi, proses değişkenlerini izlemek ve kontrol etmek için sensörler ve aktüatörler gibi çeşitli saha cihazlarından oluşur.

Endüstriyel Otomasyon Mimarisi
Proses Kontrol Seviyesi, aşağıdaki gibi çeşitli kontrol cihazlarının kontrolünden ve bakımından sorumlu merkezi bir kontrolördür. Programlanabilir Mantık Denetleyicileri (PLC'ler) ve ayrıca SCADA gibi Kullanıcı Grafik Arayüzleri ve İnsan Makine Arayüzü (HMI) bu seviyeye de dahildir. Yüksek Sipariş Kontrol Seviyesi, işle ilgili tüm operasyonları yöneten bir işletme seviyesidir.
Yukarıdaki diyagramı ve her seviyeyi ve ayrıca ara seviyeleri yakından gözlemleyerek, Profibus ve endüstriyel Ethernet bilgi alışverişine bağlı olarak görülüyor. Bu nedenle, iletişim veriyolu, kontrolörler, bilgisayarlar ve ayrıca saha cihazlarından güvenilir veri aktarımı için endüstriyel otomasyonun ana bileşenidir.
Kontrol Alanı Ağı veya CAN Protokolü

Açık Sistemler Bağlantısı (OSI) modeli
Veri iletişimi verilerin bir noktadan diğerine aktarılmasıdır. Endüstriyel iletişimi desteklemek için Uluslararası Standardizasyon Örgütü, çeşitli düğümler arasında veri aktarımı sağlamak için Açık Sistemler Ara Bağlantısı (OSI) modelini geliştirmiştir. Bu OSI protokolü ve çerçevesi üreticiye bağlıdır. CAN protokolü, OSI modelinin yedi katmanından fiziksel ve veri bağlantı katmanları olmak üzere iki alt katman kullanır.
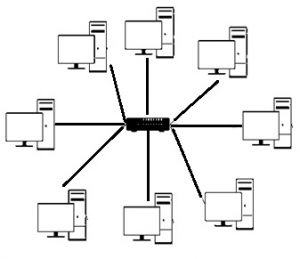
Bir Denetleyici Alan Ağı veya CAN protokolü bir çoklu ana seri iletişim veriyolu ve bağımsız denetleyicilerden oluşan bir ağdır. CAN'ın mevcut sürümü 1990 yılından beri kullanımdadır ve Bosch ve Intel tarafından geliştirilmiştir. 1 Mbps'ye kadar değişen bir iletim hızı sunarak, bir ağda sunulan düğümlere mesaj yayınlar. Etkili bir iletim için, güvenilir hata tespit yöntemlerini takip eder ve mesaj önceliği ve çarpışma tespiti konusunda tahkim için, taşıyıcı algılama çoklu erişim protokolünü kullanır. Bu güvenilir veri aktarım özellikleri nedeniyle, bu protokol otobüslerde, arabalarda ve diğer otomobil sistemlerinde, fabrika ve endüstriyel otomasyonda, madencilik uygulamalarında vb.
CAN Veri İletimi
CAN protokolü adres tabanlı bir protokol değil, mesaj odaklı bir protokoldür, burada CAN'a gömülü mesaj, aktarılmakta olan verilerin içeriğine ve önceliğine sahiptir. Veriyolundaki verilerin alınmasına bağlı olarak, her düğüm verinin atılıp atılmayacağına veya işleneceğine karar verir - ve ardından sisteme bağlı olarak, ağ mesajı tek düğüme veya diğer birçok düğüme gönderilir. CAN iletişimi, belirli bir düğümün RTR (Uzaktan İletim İsteği) göndererek başka herhangi bir düğümden bilgi istemesine izin verir.

CAN Protokolü Veri İletimi
En yüksek öncelikli mesajı aktararak ve düşük öncelikli mesajı destekleyip bekleyerek otomatik tahkimsiz veri iletimi sunar. Bu protokolde dominant, mantıksal bir 0'dır ve resesif, mantıksal 1'dir. Bir düğüm resesif bir bit ilettiğinde ve diğeri dominant bir bit ilettiğinde, o zaman baskın bit kazanır. Önceliğe dayalı bir tahkim planı, iki veya daha fazla cihaz aynı anda iletime başlarsa, iletime devam etme izninin verilip verilmeyeceğine karar verir.
CAN Mesaj Çerçevesi
Bir CAN iletişim ağı, farklı çerçeve veya mesaj formatlarında yapılandırılabilir.
- Standart veya Temel Çerçeve Formatı veya CAN 2.0 A
- Genişletilmiş Çerçeve Formatı veya CAN 2.0 B

Standart veya Temel Çerçeve Formatı veya CAN 2.0 A
Bu iki format arasındaki fark, bitlerin uzunluğunun, yani temel çerçevenin tanımlayıcı için 11 bit uzunluğunu desteklemesidir, oysa uzatılmış çerçevenin tanımlayıcı için 18 bitlik bir uzantıdan oluşan 29 bit uzunluğunu desteklemesi ve 11 bitlik bir tanımlayıcı. IDE biti, CAN genişletilmiş çerçeve formatı ile CAN temel çerçeve formatından farklıdır; burada IDE, 11 bitlik bir çerçeve durumunda baskın ve 29 bitlik çerçeve durumunda çekinik olarak iletilir. Genişletilmiş çerçeve formatlarını destekleyen bazı CAN denetleyicileri tarafından temel çerçeve formatında mesajlar göndermek veya almak da mümkündür.

Genişletilmiş Çerçeve Formatı veya CAN 2.0 B
CAN protokolünün dört tür çerçevesi vardır: veri çerçevesi, uzak çerçeve, hata çerçevesi ve aşırı yük çerçevesi. Veri çerçevesi, iletim düğümü verilerini içerir uzak çerçeve, belirli tanımlayıcı iletim hatası çerçevesi, herhangi bir düğüm hatasını tespit eder ve sistem, veri veya uzak çerçeve arasında gecikme enjekte ettiğinde aşırı yük çerçevesi etkinleştirilir. CAN iletişimi teorik olarak tek bir ağda 2032 cihaza kadar bağlanabilir, ancak pratikte donanım alıcı-vericileri nedeniyle 110 düğüm ile sınırlıdır. 10 Kbps bit hızıyla 250 Kbps baud hızıyla 250 metreye kadar kablolamayı destekler. Maksimum uzunluk 1 km, en kısası 1 Mbps ile 40 metre olur.
CAN Protokolü kullanarak Endüstriyel Otomasyon ve Kontrol
Bu endüstriyel alanı kontrol etmek için proje uygulanıyor İşlemin sıcaklık değişimlerine bağlı olarak DC motor tarafından çalıştırılan yükler. Çeşitli süreç kontrol sistemleri sıcaklığa bağlıdır. Bir karıştırıcı tankı olması durumunda - belirli bir sıcaklığa ulaştıktan sonra - karıştırıcıyı döndürmek için DC motorun açılması gerektiğini varsayalım. Dolayısıyla bu proje, bunu, oldukça verimli ve güvenilir, düşük maliyetli iletişim olan CAN protokolünün kullanımıyla başarır.
Bu projede biri sıcaklık verilerini elde etmek, diğeri ise DC motorun kontrol edilmesi . CAN Denetleyici MCP2515 ve CAN alıcı-vericisi MCP2551, veri alışverişi için CAN iletişimi uygulamak için her iki mikro denetleyiciye bağlanır.

CAN Protokolü kullanarak Endüstriyel Otomasyon ve Kontrol
İletici yan mikro denetleyici, LM35 kullanımıyla sıcaklıkları sürekli olarak izler Sıcaklık sensörü analog değerleri, ADC eklenmiş olarak dijitale çevirerek. Bu değerler, mikrodenetleyicide programlanan set değerleriyle karşılaştırılır ve mikro denetleyici gönderdiğinde bu değerler ihlal edilir. veriyi alıcıya iletir CAN denetleyicisi ve alıcı-verici birimleri ile yan mikro denetleyici.
Alıcı taraf CAN iletişimi verileri alır ve verileri daha fazla işleyen ve DC motoru bir motor sürücü IC ile kontrol eden mikro denetleyiciye aktarır. Mikrodenetleyici tarafından kontrol edilen sürücü IC ile motorun yönünü değiştirmek de mümkündür.
Böylece CAN protokolü, endüstriyel ortamda farklı düğümleri bağlayarak eşler arası iletişim sağlar. Bu tür bir iletişim, diğer ülkelerde de uygulanabilir. ev veya bina gibi otomasyon sistemleri , fabrika vb. Bu makalenin size CAN iletişimi ile endüstriyel otomasyon hakkında daha iyi bir anlayış vermiş olabileceğini umuyoruz. Daha fazla bilgi ve sorularınız için lütfen bize yazın.
Fotoğrafa katkı verenler:









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}