
Genellikle, uzaktan kumandalı robotlar, sınırlı çalışma aralığı, sınırlı kontrol ve sınırlı frekans aralığı gibi dezavantajlara sahip RF devrelerini kullanır. Bu dezavantajların üstesinden gelmek için, cep telefonuyla çalışan land rover robotik araç kullanılmaktadır. Robotik kontrol, izinsiz kontroller ve on iki adede kadar kontrol sistemi vb. Avantajlarını sağlar.
Yetenekleri ve görünümü olmasına rağmen gömülü robotik büyük ölçüde değişir, tüm robotlar bir çeşit kontrol altında hareketli, mekanik bir yapının özelliklerini paylaşır. Robotların kontrolü algılama, işleme ve eylem olmak üzere üç farklı aşamayı içerir. Normalde sensörler robota monte edilir. Algılama ve işleme, yerleşik mikro denetleyici tarafından yapılır ve eylem, motorlar kullanılarak gerçekleştirilir.
Cep Telefonuyla Çalışan Land Rover Robotik Araç

Edgefxkits.com tarafından Cep Telefonuyla Çalışan Land Rover Robotik Araç
Bu projenin temel amacı, robotik bir araca monte edilen bir robotik kolu cep telefonu kullanarak kontrol etmektir. Geniş bir çalışma aralığı ve sağlam kontrol vb. Sağlar.
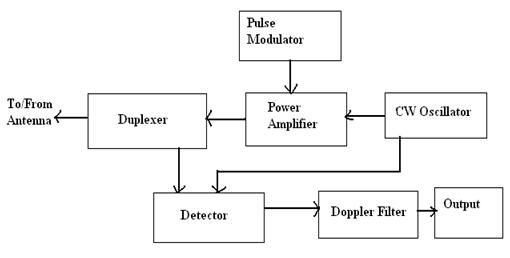
Cep Telefonuyla Çalışan Land Rover Robotik Aracın Blok Şeması:

Cep Telefonu ile Çalışan Land Rover'ın Blok Şeması
Ana yapı taşları mikrodenetleyici, Cep Telefonu, DTMF Kod Çözücü ve DC-Motor sürücü devresidir. Cep telefonu tüm sistemin en önemli parçasıdır çünkü tüm sistem çalışır ve cep telefonu tarafından etkinleştirilir. DTMF (çift tonlu çoklu frekans) giriş sinyalini cep telefonundan alır ve kodunu çözer ve ardından cihazın 4 bitlik dijital çıktısını oluşturur. 8051 mikrodenetleyici . DTMF kod çözücü bir dijital çıktı verdiğinde, her seferinde bir kesme de üretir.
Mikrodenetleyici, tüm kontrol eylemlerini gerçekleştirdiği için tüm sistemin kalbidir. Mikrodenetleyici, her iki DC motorunu da döndürerek gezgini sağa veya sola ve ileri veya geri hareket ettirmek için DTMF kod çözücü tarafından üretilen koda bağlıdır. DC motor sürücüsü, mikrodenetleyiciden düşük veya yüksek mantık açısından etkinleştirme sinyalleri alır, ardından iki motoru her iki yönde de güçlendirir ve döndürür.
Robotun kontrolü temel olarak dört farklı aşamayı içerir: algılama, eylem işleme ve algılama. Algılama aşamasında robota bağlı cep telefonu bir çağrı alırsa, cep telefonundaki tuşa basma eylemi üretilen DTMF tonunun kodunu çözer. Ardından, kod çözücü çip cep telefonundan ses sinyalini alır ve ardından DTMF tonunu ikili koda dönüştürür ve bu daha sonra mikro denetleyiciye beslenir. Bu projede, DTMF kod çözücü olarak bir MT88710 IC kullanılmıştır. İşleme aşamasında, mikro denetleyici, DTMF kod çözücüsünden alınan ikili kodu işler. Mikrodenetleyici 'C' de önceden programlanmıştır bu belirli görevi giriş bitlerine göre gerçekleştirmek.
Eylem aşamasında, motorların dönüşü, mikro denetleyici tarafından verilen girdiye bağlıdır. Landrover için her biri 30 RPM olan iki DC motor kullanılır ve motor sürücüsü IC tarafından çalıştırılır. Sahnenin tespiti üzerine ve engel tespiti için bir kızılötesi verici ve alıcı zil ile birlikte kullanılır. Engel robotun önüne geldiğinde, IR vericisi nesneye IR ışınlarını iletir, ardından nesne IR ışınlarını IR alıcısına yansıtır. IR alıcısı daha sonra zili etkinleştirmek için IR ışınlarını alır.
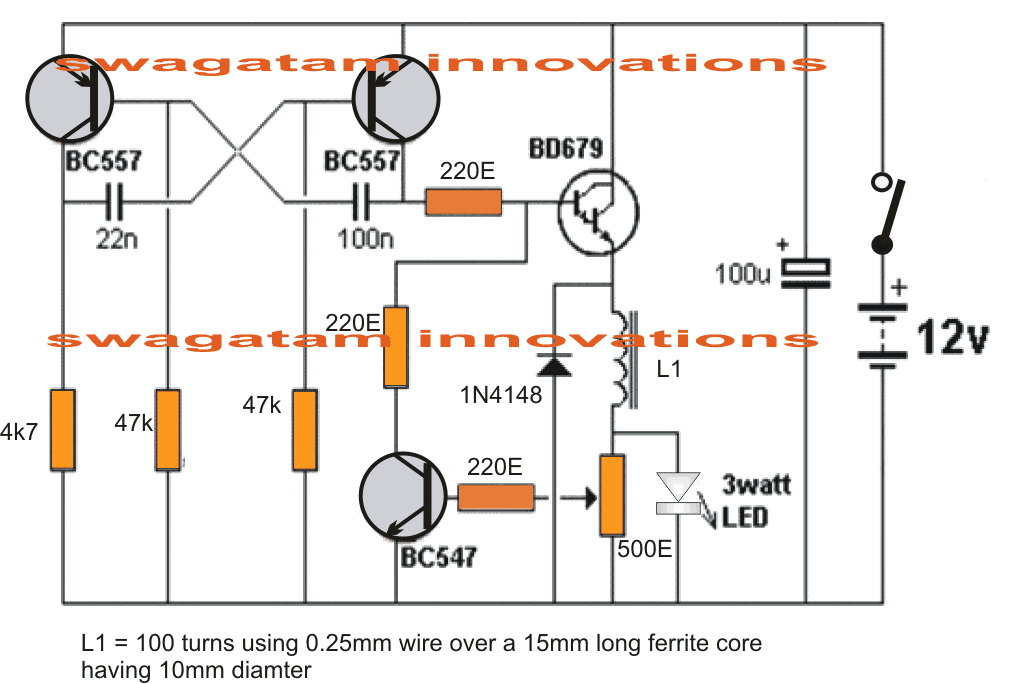
Cep telefonuyla çalışan land rover Robotik Aracın Devre Şeması:
Cep telefonuyla çalışan bu robotik arazi robotunun ana bileşenleri mikrodenetleyici, motor sürücüsü ve DTMF kod çözücüdür. Bu projede, 16 DTMF ton çiftini 4 bitlik bir kod çıktısına algılamak için dijital sayma tekniklerini kullanan bir MT8870 serisi DTMF kod çözücü kullanılmıştır. Yerleşik çevir sesi devresi ön filtrelemeyi ortadan kaldırır. Pin2'de bir giriş sinyali verilirse, giriş konfigürasyonunun etkili olduğu kabul edilir. DTMF tonunun 4 bitlik kod çözme sinyali, pim 14'ün çıkışı yoluyla pime 11 aktarılır. Bu pinler mikrodenetleyici pinleri Pao, Pa1, Pa2 ve Pa3'e bağlanır. Mikrodenetleyicinin PD0 ile PD3 ve PD7 arasındaki port pinlerinden çıkışı IN1, IN4 girişlerine beslenir ve motor sürücüsü L293D IC'nin EN1, EN2 pinlerinin iki DC motoru sürmek .

Cep Telefonuyla Çalışan Land Rover'ın Devre Şeması
Bu devrede manuel sıfırlama için S1 anahtarı kullanılır. Mikrodenetleyicinin çıkışı, DC motorları sürmek için yeterli değildir, bu nedenle motorun dönüşü için akım sürücüleri gereklidir. L293D motor sürücüsü, 4,5V ile 36V arasındaki voltajlarda 600 mA'ya kadar çift yönlü sürücü akımları sağlayacak şekilde tasarlanmıştır. DC motorları sürmek daha kolay. L293D motor sürücüsü dört sürücüden oluşur. IN1 ila IN4 & OUT1 ve OUT4 pinleri, sürücü 1'den sürücü 4'e kadar olan giriş ve çıkış pinleridir. Sürücüler 1,2,3 ve 4, etkinleştirme pimi1 (EN1) ve pin 9 (EN2) tarafından etkinleştirilir. EN1 girişini etkinleştir (pin1) yüksek olduğunda, sürücüler 1 ve 2 etkinleştirilir. Benzer şekilde, EN2 etkinleştirme girişi (pin9) sürücüleri etkinleştirir 3.
Avantajlar ve dezavantajlar:
Cep telefonuyla çalışan robotik arazi aracının avantajları arasında kablosuz kontrol sağlama ve gözetim sistemi, 3G teknolojisine dayalı araç navigasyonu ve cep telefonu ağına dayalı sınırsız operasyonel menzil bulunur. Dezavantajları şunlardır: Cep telefonu faturalandırması yüksek olduğundan maliyet mobil pillerin boşalması : Pillerin çabuk deşarj olması nedeniyle şarj kaybı nedeniyle pillerle ilgili deşarj sorunu, çünkü yüksek uyumluluk: sistem tüm cep telefonlarına uyarlanamaz, ancak kulaklık takılı olanlar kullanılabilir.
Bu nedenle, Cep Telefonu ile çalışan bu robot projesi, askeri uygulamalarda bir cep telefonu kullanarak askeri araçları kontrol etmek için çok kullanışlıdır. Gelecekte, bir ayar yaparak düşmanların konumunu tespit edebiliriz. kablosuz kamera Land rover robotik araca. Bu proje, öğrenciler bu projede önerilen çeşitli terminolojileri ve ilkeleri öğrenebildikleri için akademisyenlere de yardımcı olabilir. Bu proje, öğrencilerin yenilikçi düşüncelerini ve fikirlerini robotik projeler geliştirmek .
Fotoğrafa katkı verenler:
- Cep Telefonu tarafından işletilen Land Rover Santoshbanisetty
- Cep Telefonuyla Çalışan Land Rover'ın Devre Şeması Mühendis garajı








{kind=link}