Modern dünyada, robot önemli bir rol oynayacak . Robotun temel amacı insan gücünü azaltmaktır. Robotlar birçok uygulamada elektronikte kullanılmaktadır. Bu yazıda Arduino modülü ve 8051 mikrodenetleyici ile bir robotun nasıl yapılacağını tartıştık. Arduino ile bir robot yapmak için engellerden kaçınma ile arduino robotunu anlatıyoruz. Gerekli bileşenler arasında Robot gövdesi, DC motor, Ultrasonik sensör, Arduino modülü, Motor sürücü IC ve Arduino Modülü bulunur
Robot Nasıl Yapılır?
gerekli bileşenler robotu oluşturmak için aşağıdakileri içerir
Robot Gövdesi
Temel robot gövdesi engellerden kaçınma robotu aşağıdaki resimde gösterilmektedir. Robot gövdesi plastik bir gövdedir ve her iki tarafında tekerlekler içerir. Robot gövdesinin önünde ultrasonik sensör düzenlenmiştir. Ultrasonik sensörü kullanarak engel algılayabilir. Robot hareket ederken, ultrasonik sensör tarafından herhangi bir engel tespit edilirse, robot kenara çekilecek ve hareket etmeye devam edecektir.

Robot Gövdesi
DC motoru
DC motor bir elektrik motorudur ve doğru akım elektrikle çalışır. Herhangi bir elektrik motorunun çalışması elektromanyetizmaya dayanır. Manyetik alan, akım taşıyan iletken tarafından harici bir manyetik alana yerleştirildiğinde üretilir, iletkendeki akımla orantılı bir kuvvet yaşayacaktır.Genel olarak, mıknatısların kuzeyden güneye zıt kutup çekim olduğunu biliyoruz ve eğer kutuplar kuzeyden kuzeye ve güneyden güneye aynıdır, sonra mıknatıslar itecektir.

DC motoru
DC motorun dahili konfigürasyonu, hareketi üretmek için akım taşıyan iletken ile harici manyetik alan arasındaki manyetik etkileşimi bağlamak için tasarlanmıştır. Bunda iki DC motor kullanıyoruz, her motor 6v içerir ve toplam iki DC motor 12v içerir. Aşağıdaki görüntüde görebileceğimiz robot gövdesine iki DC motor yerleştirilmiştir. Robot gövdesi DC motorlar yardımı ile hareket ettirilir

DC Motorlu Robot Gövdesi
Arduino Modülü
Aşağıdaki görüntü arduino modül görüntüsünü göstermektedir. arduino modülü Arduino kiti kullanılarak engellerden kaçınma robotunun tasarımında önemli rol oynar. Arduino'nun alıcı pini ultrasonik sensörün ikinci pinine ve arduino modülünün 1., 2. ve 3. pinleri DC motor sürücüsüne bağlanır. Ortak komponentler kondansatör ve diyot da batarya güç kaynağı yardımı ile arduino modülüne bağlanır.

Arduino Modülü
Motor Sürücü IC
DC motoru çalıştırmak için motor sürücüsü IC Kullanılmış. Motor sürücüsünün 3,6 ve 11, 14 pinleri DC motora bağlanır. Giriş pini 1 ve 2 arduino modülüne bağlanır ve etkinleştirme pimi arduino'nun verici pinine bağlanır. Motor sürücüsünün 4, 5, 12, 13 pinleri toprağa bağlanır.

Motor Sürücü IC
Ultrasonik sensör
Bu konseptte ultrasonik sensör ileride bir engel tespit etmek için kullanılır ve komutu arduino kartına gönderir. Giriş sinyaline bağlı olarak, mikro denetleyici robotu alternatif yönlerde hareket etmesi için yeniden yönlendirir.

Ultrasonik sensör
Arduino robot engellerden kaçınma uygulamaları
- Arduino robotu herhangi bir yüzeyde hareket edebilir
- Metal yüzey üzerinde buzdolabı gövdesi gibi hareket edebilir.
Aşağıdaki resimde engellerden kaçınma için arduino robotu gösterilmektedir.

Engellerden Kaçınma için Arduino Robot
Bir robot yapmak için 8051 mikro denetleyici metal dedektörlü robot araç hakkında bilgi veriyoruz. Robotu 8051 mikro denetleyici ile oluşturmak için gerekli bileşenler
- 8051 mikrodenetleyici
- DC motorlar
- Motor sürücüleri
- Metal dedektörü
- Kod çözücü
- Kodlayıcı
- Basma düğmeleri
- Kristal
- RF verici ve alıcı
Metal dedektörü
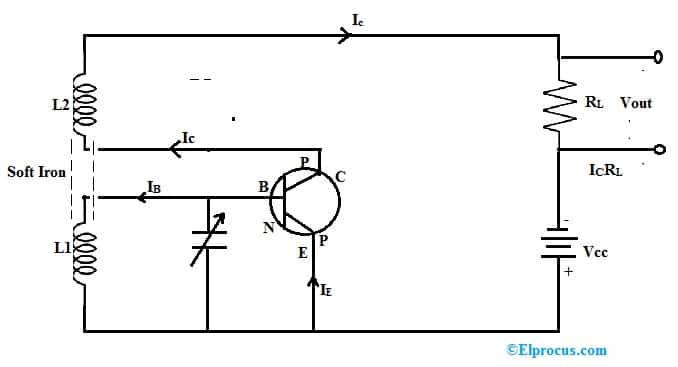
metal dedektörü Yerdeki metalleri tespit etmek için kullanılan bir veya daha fazla metal bobin içeren bir bobindir. Metal detektörü, elektromanyetik indüksiyon prensibine göre çalışır. Metal dedektör, son görüntüde gözlemleyebileceğimiz PCB ile robot gövdesine bağlanır. Aşağıdaki görüntü, elektronik projelerde kullanılan genel metal dedektörünü göstermektedir.

Metal dedektörü
Basma Düğmeleri
Basmalı düğmeler, plastik ve metal gibi sert metallerden oluşan düğmelerdir. Genel olarak basmalı düğmeler, mikro denetleyicideki programı sıfırlamak için kullanılır. Aşağıdaki resim, düğme görüntüsünü göstermektedir.

Butona basınız
8051 Mikrodenetleyici
8051 mikrodenetleyici 40 pimden oluşur . Mikrodenetleyicinin 4. ve 5. pini kristal osilatöre bağlıdır. Vcc pini 5V'luk güç kaynağına verilir ve toprak pimi toprağa bağlanır. Mikro denetleyicinin pimleri 15, 16, 18, 19, HT12E'nin kodlayıcı IC'sine bağlanır. Mikrodenetleyici pimleri 2, 7, 8, 9, basma düğmelerine bağlıdır.
Direnç, kondansatör, kristal osilatör, 8051 serisi mikrodenetleyici, kodlayıcı vb. Tüm bileşenleri bağladıktan sonra aşağıdaki görüntü yanmaktadır. baskılı devre kartı .

PCB Bağlantıları
Aşağıdaki görüntü 8051 serisi mikro denetleyiciye sahip metal dedektör robotunu göstermektedir.

8051 Serisi Mikrodenetleyicili Metal Dedektör Robotu
Bu yazıda tartıştık Arduino ve 8051 Mikrodenetleyici ile bir robot nasıl yapılır . Umarım bu makaleyi okuyarak bir robot yapmak için bazı temel bilgiler edindiniz. Bu makale veya elektronik ve elektronik cihazlar hakkında herhangi bir sorunuz varsa iletişim projeleri , lütfen aşağıdaki bölümde yorum yapmaktan çekinmeyin. İşte sana soru 8051 serisi mikrodenetleyici nedir?
.