Bu yazıda, çok yönlü bir dörtlü yarı-H sürücü IC olan ve birçok ilginç motoru uygulamak için kullanılabilen IC L293'ün teknik özelliklerini ve bağlantı ayrıntılarını araştırıyoruz. sürücü tabanlı devre motorları, solenoidleri ve diğer endüktif yükleri çalıştırma gibi uygulamalar (4 birim ayrı ayrı veya itme-çekme modu aracılığıyla çiftler halinde).
Nasıl çalışır
IC L293, temel olarak, totem direği modu olarak da adlandırılan, iki ayrı yükü itme modunda veya çift yönlü olarak çalıştırmak için bağımsız olarak kullanılabilen iki çift çıkış içerir. 4 ayrı yükü tek yönlü olarak çalıştırmak için kullanılır.
Yüklerin yukarıdaki işlemleri, harici bir osilatör devresinden veya bir PWM kaynağı .
Örneğin, yükün bir totem direği şeklinde çalıştırılması gerekiyorsa, IC'nin iki sürücü aşamasının karşılık gelen girişleri, harici bir cihazdan tetiklenebilir. osilatör, birkaç NAND geçidi gibi burada bir kapı bir osilatör olarak kablolanabilirken diğeri bir invertör olarak bağlanabilir.
Bunlardan gelen iki anti-faz sinyali NAND kapıları daha sonra ilgili çıkışları totem direği (itme-çekme) şeklinde çalıştırmak için L293'ün girişlerine bağlanabilir ve bu da bağlı yükü aynı şekilde çalıştırır.
IC L293'ün pin çıkışı ataması
Şimdi IC L293'ün pinout fonksiyonlarını aşağıdaki diyagrama bakarak ve aşağıdaki açıklamadan öğrenelim:

Pin # 2, çıkış pini # 3'ü kontrol eden kontrol girişidir.
Benzer şekilde, pim # 7, çıkış pini # 6 için kontrol girişidir.
Pin # 1, yukarıdaki pin gruplarını etkinleştirmek veya devre dışı bırakmak için kullanılır. Pim # 1'deki pozitif, yukarıdaki pinout setlerini etkin ve aktif tutarken, negatif veya 0V besleme onları anında devre dışı bırakır.
Oldukça benzer şekilde, Pin # 15 ve pin # 10, karşılık gelen pin # 14 ve pin # 11 çıkışları için kontrol girişleri haline gelir ve bunlar yalnızca pin # 9 pozitif mantıkta tutulduğu ve bir 0V mantığı olduğunda devre dışı bırakıldığı sürece çalışır durumda kalır. bu pinout'a uygulanmıştır.
Daha önce açıklandığı gibi, pim # 3 ve pim # 6, giriş pini # 7 ve pim # 2'ye bir anti-faz mantık sinyali besleyerek totem kutup çiftleri olarak kullanılabilir. Yani, pin # 2 pozitif bir mantıkla beslendiğinde, pin # 7 negatif bir mantıkta olmalıdır ve bunun tersi de geçerlidir.
Bu, çıkış pimi # 6 ve pim # 3'ün bağlı yükü karşılık gelen bir yönde çalıştırmasına izin verecektir ve tersine, giriş mantık sinyalleri tersine çevrildiğinde, yük polaritesi de tersine çevrilecek ve ters yönde dönmeye başlayacaktır.
Bu sıra hızlı bir şekilde değiştirilirse, yük buna uygun olarak ileri-geri veya itme-çekme şeklinde çalışır.
Yukarıdaki işlem, diğer taraftaki sürücü çiftinde de kopyalanabilir.
IC için Vcc veya pozitif besleme girişleri, iki farklı besleme girişi için bağımsız olarak yapılandırılır.
Pin # 16, (Vcc1), etkinleştirme pin çıkışlarını çalıştırmak ve IC'nin diğer dahili mantık aşamalarını çalıştırmak için kullanılır ve bu, maksimum sınırlama 36V olmasına rağmen 5V'luk bir girişle sağlanabilir.
Pin # 8, (Vcc2) özellikle motorlara güç sağlamak için kullanılır ve bu 4,5V ila 36V arasında herhangi bir şeyle beslenebilir
IC L293'ün Elektriksel Özellikleri
IC L293, 4,5V ile 36V arasındaki herhangi bir güç kaynağıyla çalışacak şekilde tasarlanmıştır ve maksimum akım işleme özelliği 1 amperi (darbe modunda 2 Amp, maks. 5 ms)
Bu nedenle, yukarıda belirtilen spesifikasyonlar dahilindeki herhangi bir yük, IC L293'ün tartışılan çıktıları üzerinden çalıştırılabilir.
Giriş kontrol mantığı, ister sürekli besleme ister PWM kaynağı olsun, 7V'nin üzerinde aşılmamalıdır.
Motor Kontrol Uygulaması için L293 IC'yi Kullanma
Şimdi, IC L293'ü kullanarak farklı çalışma modları aracılığıyla ve ayrı kontrol tesisine sahip 4 adede kadar motor kullanarak motor kontrol devrelerinin nasıl uygulanacağını öğrenelim.
Bir önceki yazımızda, IC L293'ün bağlantılarını ve işleyiş detaylarını inceledik, burada aynı IC'nin belirli modlar ve konfigürasyonlar aracılığıyla motorları kontrol etmek için nasıl kullanılabileceğini öğreniyoruz.
Kontrol Modları
IC L293, aşağıdaki modlarda motorları kontrol etmek için kullanılabilir:
1) Bağımsız PWM girişleri üzerinden 4 motor.
2) PWM aracılığıyla hız kontrollü çift yönlü veya totem direği modunda 2 Motor
3) PWM girişini kullanan bir 2 fazlı BLDC motor
Aşağıdaki resim, IC'nin bağımsız kontrollere sahip motorları kontrol etmek için nasıl kullanılabileceğini ve ayrıca tek bir motorun bir şeye ulaşmak için nasıl kullanılabileceğini göstermektedir. çift yönlü kontrol :

IC'nin sol tarafı, çift yönlü modda çalışacak şekilde yapılandırılmış bir motoru gösterir. Motorun seçilen yönlerden birinde dönmesini sağlamak için, pim # 1 ve pim # 7, anti-faz 5V DC girişi ile uygulanmalıdır. Motor dönüş yönünü değiştirmek için, bu 5V polarite belirtilen giriş pin çıkışları boyunca değiştirilebilir.
Motoru ve IC işlevini etkin durumda tutmak için Pin # 1 mantıksal yüksek tutulmalıdır, buradaki mantık 0, motoru anında durduracaktır.
Kontrol giriş pin çıkışlarındaki besleme PWM biçiminde olabilir, bu ek olarak motorun hızını kontrol etmek Sadece PWM görev döngüsünü değiştirerek 0'dan maksimuma.
IC'nin sağ tarafı, bir çift motorun, ilgili pim # 15 ve pim # 10'daki bağımsız PWM girişleri aracılığıyla bağımsız olarak kontrol edildiği bir düzenlemeyi gösterir.
Motorun ve IC'nin çalışmasını sağlamak için Pin # 9 mantıksal olarak yüksek tutulmalıdır. Bu pinout'taki mantıksal sıfır, bağlı motorların işlevini anında durduracak ve devre dışı bırakacaktır.
IC'nin sol taraf ve sağ taraf bölümleri, pinout çalışma detaylarıyla aynı olduğundan, motorların gösterilen düzenlemesi, yukarıda açıklanan aynı işlevi elde etmek için ilgili pin çıkışları arasında değiştirilebilir, yani iki ayrı motorun bağlanabileceği anlamına gelir. IC'nin sol tarafı, şemada IC'nin sağ tarafında olduğu gibi.
Benzer şekilde, çift yönlü sistem, yukarıda gösterilen diyagramda IC'nin sol tarafında elde edildiği gibi, IC pin çıkışlarının sağ tarafına dahil edilebilir.
Yukarıdaki örnek, IC L293'ün 4 motoru ayrı ayrı veya çift yönlü modda 2 motoru kontrol etmek için nasıl kullanılabileceğini ve IC'nin ilgili giriş pin çıkışlarında bir PWM beslemesi kullanılarak hızın nasıl kontrol edilebileceğini göstermektedir.
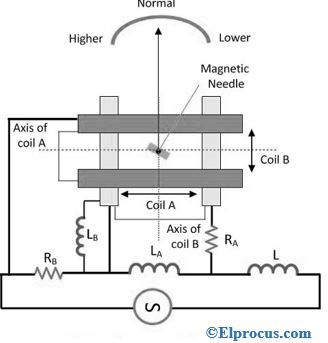
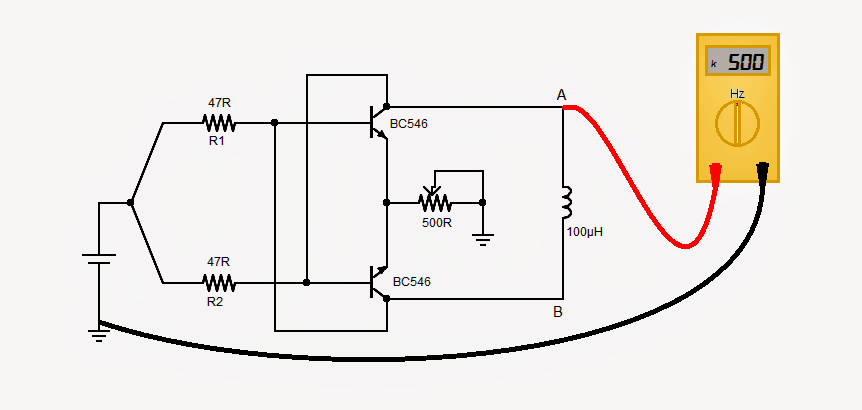
2 fazlı bir BLDC motoru kontrol etmek için L293'ü kullanma

Yukarıdaki görüntüde, IC L293'ün, 2 fazlı bir BLDC motoru, belirtilen pin çıkışlarını kullanarak ve kontrol A ve kontrol B olarak gösterilen birkaç kontrol girişi aracılığıyla kontrol edecek şekilde nasıl yapılandırılabileceğini görebiliriz.
Girişler, motor kontrolü için gerekli anti-faz giriş mantığını oluşturmaktan sorumlu hale gelen bir dizi NOT geçidi ile bağlanırken, IC'nin çıkışlarına tek bir 2 fazlı motor bağlanmış olarak görülebilir.
Kontrol A ve Kontrol B noktaları, 2 fazlı motorun doğru şekilde dönmesini sağlamak için alternatif bir mantığa tabi tutulabilir.
Değişen mantığın polaritesi, motorun dönüş yönüne karar verir.
Motor üzerinde doğrusal bir hız kontrolü elde etmek için, kontrol A ve kontrol B girişleri boyunca bir PWM mantık biçimi uygulanabilir ve bağlı motorda istenen hız kontrolünü elde etmek için görev döngüsü değiştirilebilir.
IC'nin teknik özellikleri veya veri sayfası veya bağlantı ayrıntıları hakkında başka şüpheleriniz varsa, anında yanıtlar için aşağıya yorum yapmaktan her zaman çekinmeyin.
Önceki: Arduino Kullanarak 433 MHz RF Bağlantısını Kullanan Kablosuz Termometre Sonraki: BLDC ve Alternatör motorları için Evrensel ESC Devresi