Bir dört pervaneli uzaktan kumanda devreleri piyasadan veya herhangi bir çevrimiçi mağazadan çok kolay bir şekilde temin edilebilmesine rağmen, hevesli bir elektronik hobisi, bunların gerçekte nasıl çalıştığını ve bunların evde inşa edilip edilemeyeceğini asla öğrenemez mi?
Bu yazıda bir inşa etmeye çalışacağız basit quadcopter uzaktan kumanda devresi ayrı bileşenleri kullanarak ve RF uzaktan kumanda modüllerini kullanarak ve karmaşık MCU tabanlı devreleri dahil etmeden.
Adım adım kılavuz aslında ilgilenen hobilerin bir PWM konsepti kullanılarak bir quadcopter'ın ne kadar basit bir şekilde kontrol edilebileceğini anlamalarını sağlayacaktır.
Biz zaten öğrendik quadcopter temelleri , şimdi nihayetinde üniteyi uzaktan uçurmaya yardımcı olacak bir uzaktan kumanda bölümünü inceleyelim.
Gerekli Temel Modüller
Proje için gerekli olabilecek ana bileşenler aşağıdaki gibidir:
Temel olarak aşağıdaki 3 devre aşamasına ihtiyaç duyacağız:
1) 4 yollu RF uzaktan kumanda Tx, Rx modülleri - 1 set
2) IC 555 tabanlı PWM jeneratör devreleri - 4nos
3) BLDC motor kontrolör devreleri - 4nos
Ev yapımı bir versiyon olduğu için, tencere veya potansiyometrelerle değiştirilen kontroller için kumanda kollarının olmaması gibi önerilen tasarımda bazı verimsizlikler bekleyebiliriz, ancak yine de sistemin çalışma kapasitesinin aynı seviyede olması beklenebilir. profesyonel birimler.
Elde taşınan PWM verici ünitesi, temel olarak 4 ayrı PWM kontrol devresiyle entegre Tx uzak modülünden oluşurken, dörtlü pervanenin 4 ayrı BLDC sürücü devresiyle entegre 1 Rx devresi ile çevrelenmesi gerekecektir.
Quadcopter motor devreleriyle başlayalım ve BLDC motor kontrol cihazının Rx devresiyle nasıl yapılandırılması ve bağlanması gerektiğini görelim.
Quadcopter PWM Alıcı Devresi
Önceki gönderilerden birinde, çok yönlü bir BLDC motor kontrol cihazının tek bir çip kullanılarak nasıl inşa edilebileceğini öğrendik, ancak bu tasarım, bir quadcopter'ın nispeten daha ağır motorlarını çalıştırmak için tasarlanmadı, bu nedenle mevcut uygulama için uygun olmayabilir.
Yukarıdaki devre için bir 'büyük kardeş' seçeneği neyse ki mevcuttur ve dört pervaneli motorları sürmek için mükemmel bir şekilde uygun hale gelir. TEXAS INSTRUMENTS sayesinde, bize böylesine harika tek yongalı uygulama belirtilmiş devre modülleri sağladığı için.
Bu yüksek akım BLDC sürücü IC hakkında daha fazla bilgi edinmek için, aşağıdaki pdf veri sayfasına bakabilirsiniz.
https://homemade-circuits.com/wp-content/uploads/2015/10/slwu083a.pdf
Aşağıdaki kurulum, aşırı yük koruması, termal koruma vb. Gibi gerekli tüm koruma özelliklerinden oluşan bağımsız bir düşük akımlı BLDC motor devresi olan DRV11873 IC'yi kullanan dört pervaneli motor sürücü kontrolörünün tam devre şemasını gösterir. Bu modül temelde ESC'yi oluşturur. mevcut quadcopter ünitemiz için.
Bu tasarım ve PCB ayrıntıları hakkında daha fazla bilgi için aşağıdaki orijinal belgeye bakabilirsiniz:
http://www.ti.com/lit/ds/symlink/drv11873.pdf

Nasıl çalışır
IC'nin FS ve FG pin çıkışları, IC'yi harici devreler aracılığıyla eklenen kontrollerle güçlendirmek içindir, çünkü bu özellikleri tasarımımızda kullanmıyoruz, bu pinler kullanılmadan bırakılabilir ve 100K'lık bir dirençle pozitif hatta sonlandırılabilir.
IC'nin RD pin çıkışı, motorun dönüş yönüne karar verir. Bu pimi Vcc'ye 100K'lık bir dirençle bağlamak, motorda bağlantısız bırakılırken saat yönünün tersine dönmesine izin verir ve bunun tersini yapar ve motorun saat yönünde dönmesini sağlar.
Pin # 16, harici bir kaynaktan bir PWM girişi enjekte etmek için kullanılan PWM girişidir, PWM'nin görev döngüsünü değiştirmek, motorun hızını buna göre değiştirir.
FR, CS pin çıkışları da ihtiyaçla ilgisizdir ve bu nedenle diyagramda gösterildiği gibi kullanılmadan bırakılabilir ve 100K'lık bir dirençle pozitif hatta sonlandırılabilir.
U, V, W pin çıkışları, ilgili quadcopter BLDC 3 fazlı motora bağlanması gereken motor çıkışlarıdır.
COM pin çıkışı, 3 fazlı motorun ortak kablosunu bağlamak içindir, eğer motorunuzda ortak bir kablo yoksa, 3 adet 2k2 direnci U, W, W pinlerine bağlayarak ve daha sonra ortaklarını birleştirerek basitçe simüle edebilirsiniz. IC'nin COM pini ile biter.
Şema ayrıca PWM kararsız devre modunda yapılandırılmış bir IC 555'i gösterir. Bu, devre modülünün bir parçası haline gelir ve pim # 7'den gelen PWM çıkışı, 4 motoru sabit bir temel hız ile başlatmak ve motora sabit bir gezinme sağlamak için DRV IC devresinin PWM girişine bağlı olarak görülebilir. belirli bir noktada hız.
Bu, quadcopter tasarımı için ana ELC devresini veya BLDC sürücü devresini tamamlar.
Quadcopter tasarımımızdaki dört motor için bu tür dört modüle ihtiyacımız olacak.
Yani, IC 555 PWM aşaması ile birlikte bu tür 4 DRV IC'nin quadcopter'ın 4 motorunun her biri ile ilişkilendirilmesi gerekecektir.
Bu modüller, ilgili DRV denetleyici IC'lerin her birine sabit ve aynı PWM sinyali uygulayarak normalde 4 motorun tamamının önceden belirlenmiş bir hıza ayarlanmasını sağlayacaktır.
Şimdi, sıradan bir 4 kanallı uzaktan kumanda ahizesi kullanarak bireysel motorun hızlarını değiştirmek için PWM'nin bir uzaktan kumanda ile nasıl değiştirilebileceğini öğrenelim.
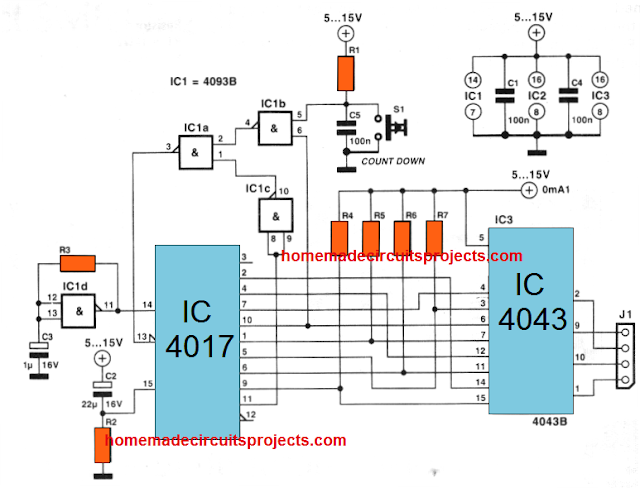
RF Alıcı Modülü (PWM Dekoder)

Yukarıdaki devre, kullanıcının uzak verici el cihazından harici bir kablosuz PWM verisi almak için quadcopter içinde barındırılması beklenen alıcı uzak RF devresini gösterir ve daha sonra, eşlik eden DRV kontrolör modüllerini aşağıdaki şekilde açıklandığı gibi beslemek için sinyalleri uygun şekilde işlemektedir. önceki bölüm.
PWM # 1… .PWM # 4 olarak adlandırılan 4 çıkışın, önceki şemada gösterildiği gibi DRV IC'nin PWM pini # 15 ile bağlanması gerekir.
RF alıcı ünitesinden gelen bu PWM pin çıkışları, verici el cihazında kullanıcı tarafından karşılık gelen düğmeye her basıldığında etkinleştirilir.
RF Vericinin Nasıl Kablolanması Gerekir (PWM Kodlayıcı)
Yukarıdaki bölümde, Rx veya uzak alıcı devresini ve 4 çıkışının dört pervaneli motor ESC sürücü modülleri ile nasıl bağlanması gerektiğini tartıştık.
Burada, basit RF vericisinin, PWM verilerini kablosuz olarak dört pervaneli alıcı birimine iletmek için PWM devreleriyle nasıl oluşturulması ve kablolanması gerektiğini görüyoruz, böylece bireysel motorun hızları basitçe bir düğmeye basarak kontrol edilir, bu da sonuçta kullanıcıların tercihlerine göre yönünü veya hızını değiştirmek için quadcopter.

Yukarıda gösterilen devre, verici modülün kablolama ayrıntılarını gösterir. Fikir oldukça basit görünüyor, ana verici devresi, kodlanmış PWM sinyallerini atmosfere ileten TSW434 yongası ve kodlanmış sinyalleri TSW yongasına beslemekten sorumlu hale gelen HT12E tarafından oluşturuldu.
PWM sinyalleri, daha önce DRV kontrol modülünde tartışılanla aynı olabilen 4 ayrı IC 555 devre aşaması tarafından üretilir.
4 IC'nin PWM içerikleri, SW1 ---- SW4 olarak gösterilen 4 ayrı basma düğmesiyle IC HT12E kodlayıcının ilgili pin çıkışlarına sonlandırılmış olarak görülebilir.
Bu düğmelerin her biri, daha önce tartıştığımız ve PWM # 1, PWM # 2… ..PWM # 4 olarak belirtilen alıcı modülünün aynı pin çıkışına karşılık gelir ve geçiş yapar.
Bu, SW1'e basılması, alıcı birimin PWM # 1 çıkışının aktif olmasına neden olabilir ve bu, pim çıkışı, alınan kodu çözülmüş PWM sinyallerini vericiden ilgili DRV modülüne beslemeye başlayacak ve karşılığında ilgili motorun hızını buna göre değiştirmesine neden olacaktır.
Benzer şekilde SW2,3,4'e basmak, kullanıcıların isteğine göre diğer 3 quadcopter motorunun hızlarını etkilemek için kullanılabilir.
IC 555 PWM Devresi
Yukarıdaki RF verici el cihazında gösterilen 4 PWM devresi, DRV denetleyici ESC devremizde görülene tamamen benzeyen aşağıdaki şemaya bakılarak oluşturulabilir.

Lütfen 5K potun normal bir pot şeklinde olabileceğini ve bu potun ilgili motorlarda farklı hızları seçmek için düğmelerle birlikte kullanılabileceğini unutmayın.
Bu, seçilen bir düğmeyi basılı tutarak ve aynı anda karşılık gelen 5KPWMpotu hareket ettirerek, quadcopter'ın hızını istenen yönde artırmasına veya azaltmasına neden olabilir.
Alternatif olarak, PWM başlangıçta daha yüksek veya daha düşük bir seviyeye ayarlanabilir ve ardından karşılık gelen dört pervaneli motorun PWM ayarına göre tercih edilen hıza ulaşmasını sağlamak için ilgili düğmeye basılabilir.
Quadcopter Motor Özellikleri
Yukarıda açıklanan Qiadcopter uzaktan kumanda devresinin yalnızca görüntüleme amacıyla kullanılması amaçlanmıştır ve yükleri veya bir kamerayı kaldırmak için kullanılamaz. Bu, tasarımda kullanılan motorların tercihen düşük akım tipi olması gerektiği anlamına gelir.
DRV11873 IC, 15V, 1.5 amper veya yaklaşık 20 watt motorları çalıştırmak için tasarlanmıştır ... bu nedenle, 15 ila 30 watt arasında derecelendirilmiş herhangi bir 3 fazlı BLDC motor bu amaçla kullanılabilir.
Bu quadcopter tasarımı için pil, 1,5 amper sürekli akımda 15V tepe sağlayabilen herhangi bir 12v Lipo pr Li-ion pil olabilir.
Şartname Ayrıntıları
1306N Fırçasız Outrunner Minyatür DC Motor
Tür: Mikro Motor
İnşaat: Kalıcı Mıknatıs
Değişim: Fırçasız
Hızı (RPM): 2200rpm / v
Sürekli Akım (A): 1.5 ~ 2.6A
Gerilim (V): 7,4 ~ 11,1V
minyatür dc motor: AX-1306N
ağırlık: 8g
milin çapı: 1.5mm
Pil LI-PO: 2-3s
çalışma akımı: 1.5 ~ 2.6A
maksimum verimlilik:% 67

Önceki: Sensörsüz BLDC Motor Sürücü Devresi Sonraki: Butonları Kullanan Isıtıcı Kontrol Devresi