Bu yazıda BLDC motorun ne olduğunu araştırıyoruz ve ardından sensörsüz bir BLDC motor sürücü devresinin tasarımını öğreniyoruz.
BLDC CPU Fanları
En yüksek verimlilikle çalışan, minimum alan, akım tüketen ve yine de belirli ekipman için öngörülen önemli işlemleri sağlayabilen CPU'larda, voltaj dengeleyicilerinde, DVD oynatıcılarda ve diğer benzer ekipmanlarda hızlı hareket eden fanları gördünüz mü?
Evet, bunlar eski geleneksel fırçalı motorlardan çok daha üstün olan BLDC fanların veya fırçasız DC motorların modern versiyonlarıdır.

Resim İzniyle: https://en.wikipedia.org/wiki/Computer_fan#/media/File:Geh%C3%A4usel%C3%BCfter.jpg
Bununla birlikte, bir BLDC motor, sofistike bir sürücü devresi gerektirecektir ve evet, tüm bu CPU fanları, bu sürücü modüllerini dahili olarak içerir, ancak bunlar sıradan bir DC kullanılarak kolayca çalıştırılabilir gibi görünse de, dahili olarak sistem zaten akıllı bir devre ile donatılmıştır.
BLDC Motor Sürücüsü
Burada, herhangi bir küçük BLDC motorunu inanılmaz bir verimlilikle sürmek için tek bir yonga DRV10963 kullanarak böyle bir akıllı BLDC motor sürücü devresi hakkında bilgi edineceğiz ve daha sonra gelecek makalelerden birinde, bu IC devresinin sürüş için nasıl yükseltilebileceğini göreceğiz. olanlar gibi güçlü yüksek akımlı BLDC'ler quadcopters'da kullanılır.
Ancak bundan önce BLDC motorları hakkında biraz bilgi edinmek ilginç olacaktır.
Fırçalı ve Fırçasız DC Motorlar Arasındaki Fark
Fırçalanmış bir motor ile fırçasız bir motor ile verimlilik oranı arasındaki fark oldukça açıktır.
Fırçalanmış motorlar, mıknatıslar arasında hareket eden sarılmış armatüre sahip olduğundan, hareketli bobin terminallerinin, besleme kaynağına kendilerinin ulaşmasına gerek kalmadan sürekli olarak besleme voltajını alabilmesi için 'fırçalar' (sürtünme kontakları) kullanmak zorundadır, aksi takdirde imkansız çalışmak ve operasyonları tehlikeye atmak.
Fırçasız bir motorda, bobin veya sargı asla hareket etmez ve sabittir, burada rotor bir dizi kalıcı mıknatıs taşır ve çevreleyen sargının manyetik akılarının etkisiyle döner.
Mıknatıs tüm zorluklardan arınmış olduğundan ve gücü yönetmek veya almak için terminalleri dahil etmeden çalışabildiğinden, zahmetsizce gidebilir, hızlı bir hızda ve neredeyse gürültüsüz bir seviyede dönebilir.
Ama burada bir sorun var. Bir elektromıknatısın kalıcı bir mıknatısın akılarına yanıt vermesi için, manyetik fazın veya kutupların sabit bir kayması olması gerekir, böylece iki muadil sürekli olarak reaksiyona girebilir ve karşı bir kuvvetten geçebilir, böylece gerekli burulma kuvveti rotor ve elde edilen tork ile dönüşü gerçekleştirin.
Fırçalanmış bir motorda, bu, armatür bobininin kendi kendini ayarlayan doğası nedeniyle daha kolay hale gelir; bu, dönebilen ve kendi kendine devam eden bir karşıt manyetik kuvvet oluşturabilen ve herhangi bir harici darbeye veya işlemeye ihtiyaç duymadan dönmeye devam edebilir.
Bununla birlikte, bir BLDC'de bu bir problem haline gelir, çünkü mıknatıs rotoru 'bilgisiz' kalır ve tesadüfi bir şekilde değil anlamlı bir şekilde dönmesi için sargıdan hesaplanmış bir manyetik komut gerektirir.
İşte tam da bu nedenle, tüm BLDC motorlar, motorun içindeki üç farklı sargı setini kumanda etmek için zorunlu olarak bir motor sürücü devresine ihtiyaç duyar.
Bu nedenle, tüm BLDC'ler esasen 3 fazlı motorlardır ve rotor üzerinde dönme torku üretmek için zorunlu olarak 3 faza ihtiyaç duyarlar.
Sensörsüz BLDC Sürücüler Ne Yapar
Sensörsüz BLDC sürücü devresi, 3 set sargıyı sıralı bir şekilde elektriklendirir, öyle ki manyetik rotor, motorun sürekli bir tork ve dönme kuvveti gerçekleştirmesini sağlayan tutarlı bir karşıt kuvvetten geçebilir.
Ancak BLDC sargısının devre tarafından bu sıralı gücü rastgele ayarlanamaz, ardışık veya rotor mıknatısının dönme konumuna yanıt olarak olmalıdır, aksi takdirde uygulama karışık olabilir ve motor şaftına (rotor ) gelişigüzel dönerek, yani saat yönünde ve saat yönünün tersinde, hissedilir bir dönüş olmadan sarsılıyor.
BLDC Motorlarda Sensörler Neden Kullanılır?
Bu nedenle, birçok BLDC motor varyantının içine yerleştirilmiş sensörleri tanıtıyoruz, bu sensörler (tipik olarak Hall etkisi sensörleri) rotor mıknatısının manyetik kutuplarının değişen konumunu 'anlıyor', bağlı işlemci devresine karşılık gelen sargıyı elektriklendirmesi ve bir dönme hareketi gerçekleştirmesi talimatını veriyor. optimum tork ile.
Hall etkisi sensörleri, boyut olarak nispeten daha büyük olan çoğu BLDC motorda etkin bir şekilde kullanılmaktadır, ancak CPU fanları, CPU sürücüler, DVD oynatıcılar, küçük egzoz fanları gibi daha küçük motorlar için, quadcopterlerde kullanılan motorlar için, salon etkisi sensörleri uygunsuz hale gelebilir. ve bu nedenle alternatif bir sensörsüz yaklaşım uygulanmaktadır.
Bu, ilgili sargı setlerini işlemek ve elektriklendirmek ve dönme torkunu yürütmek için referans kaynağı olarak alınan sargının doğal geri EMF elektriğinin kullanılmasını içerir.

BLDC Rotor Hareketini Simüle Etme
Yukarıdaki ham simülasyonda, serbest bırakılan EMF'nin nasıl referans olarak alındığını ve sonraki sarma setleri için sıralama darbeleri üretmek için kullanıldığını ve merkezi kalıcı mıknatıs rotoruna bir dönme torku uygulayarak görselleştirebiliriz. Simülasyon tam bir kopya olmayabilir, ancak yine de çalışma prensibi hakkında kabaca bir fikir verir.
Mıknatısın N / S'si tam olarak sargı göbeğinin merkezinde olduğunda darbenin değiştirildiğini not etmek ilginçtir, bu da sargının darbe polaritesine bağlı olarak N veya S olarak enerjilendirilmesini ve bir çekme ve itme üretmesini sağlar. N / S mıknatısları üzerindeki kuvvet, böylece mümkün olan maksimum seviyede gerekli torku üretir.
Ve bu, önceki sargının değiştirilmesiyle salınan arka EMF nedeniyle mümkün hale gelir.
Yukarıdaki tartışma, bir sensörün daha az BLDC motorunun çalışmasını açıklığa kavuşturuyor, şimdi belirli bir devrenin 3 fazlı bir anahtarlamanın yukarıdaki karmaşık uygulamasını nasıl ele aldığını öğrenelim.
BLDC Sürücüsü DRV10963
Biraz Google'dan sonra, bu sensörsüz BLDC sürücü devresini, yapılandırmada ihmal edilebilir miktarda parça kullanan ve yine de amaçlanan eylemler için karmaşık bir işlem uygulayabilen tek bir yonga DRV10963 kullanarak buldum.
DRV10963, motor sargısından yalnızca arka EMF'yi tahmin ederek ve sargı üzerinde hassas bir komut vererek ve rotor üzerinde optimum bir dönme torku sağlayarak sensörsüz BLDC motorları çalıştırmak için özel olarak tasarlanmış son teknoloji ürünü bir çiptir.
Devre şeması

Yukarıdaki görüntü, IC'nin kendisinden başka hiçbir şey içermediği anlaşılan devrenin basit düzenini göstermektedir.
Çeşitli pin çıkışları, motorun PWM hız kontrolü, yön kontrolü, vb. Gibi belirtilen işlevleri gerçekleştirmek için, yalnızca ilgili pin çıkışlarını harici bir kaynaktan belirtilen verilerle besleyerek tahsis edilir.
Aşağıdaki resim, 10 pinli bir DIL IC'ye benzeyen yonganın paketini göstermektedir; aynı şeyin çeşitli pinout fonksiyonları, diyagramda verilen verilerden incelenebilir:

Önerilen sensörsüz BLDC sürücü devresinin devre şemasına atıfta bulunarak Önceki makalede ve ayrıca yukarıdaki çip görüntüsünde sunulduğu gibi, pin çıkışı detayları şu şekilde anlaşılabilir:
IC Pinout Detayları
FG = Dahili BJT ile açık kolektör modunda teçhiz edilmiş motor hızı gösterge pimidir (çıkış).
Açık kollektör, bu pin çıkışındaki çıkışın, açık kollektör ve toprak boyunca batan mantıklarla negatif PWM'ler üreteceğini, dolayısıyla geçerli bir okuma elde etmek için kullanıcının bu açık kollektör ve pozitif besleme (5V) boyunca bir yukarı çekme direnci bağlamasının gerekeceğini belirtir. ) Bu pinout'ta hız göstergesini gerçekleştirmek için.
FGS = Bu, hız göstergesi seçici girişi, yani FG gösterge pimini AÇMAK / KAPATMAK için burada mantık yüksek veya düşük sunulabilir.
Vcc = Çalışmasını sağlamak için IC'ye pozitif besleme, 5V'u geçmemelidir.
W, U ve V, bu IC aracılığıyla çalıştırılması beklenen BLDC motor için 3 fazlı çıkışlardır. Bu aynı zamanda motor bobinlerinin gerekli senkronize anahtarlaması için motor EMF darbelerini algılamak için girişler gibi davranır.
GND = IC'nin Vdd pinine göre negatif besleme pin çıkışını ifade eder.
FR = Motorun yönünü seçmeye veya komuta etmeye yardımcı olur ve sisteme güç verildiğinde, basitçe bir harici mantık yüksek veya mantık düşük getirilerek dinamik olarak değiştirilebilir.
PWM = Bir PWM kontrol girişini belirtir. harici PWM dalga formu üreteci.
Bu PWM girişi, bağlı BLDC motorun istenen hız kontrolünü uygulamak için değişken olabilir.
Çipin merkezindeki noktalı boşluk, yüklü bir BLDC motor ile kullanılırken yonga üzerindeki olası ısı oluşumunu azaltmak için bir soğutucu ile sıkıştırılabilen veya bastırılabilen termal pedi gösterir.
Yukarıdaki tartışma, sensörsüz BLDC motor sürücü çipi DRV10963'ün pin çıkışı veya bağlantı detaylarını belirtir, şimdi çipin dahili konfigürasyonunu ve işleyişini aşağıdaki noktaların yardımıyla detaylı olarak analiz edelim:
Cihaz Tanımı
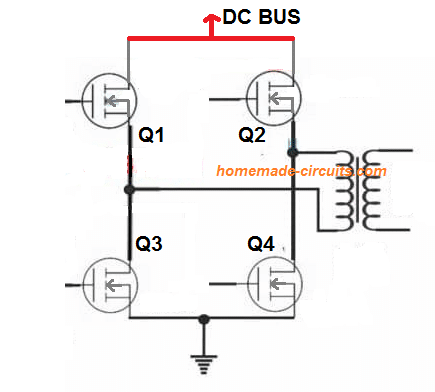
DRV10963, dahili güç MOSFET'lerine (3 fazlı H köprülü) sahip 3 fazlı sensörsüz bir elektrik motoru operatörüdür. Daha yüksek üretkenlik, daha az gürültü ve minimum ikincil malzeme sayımlı motor sürücü işlevleri için tasarlanmıştır. Özel sensörsüz penceresiz 180 ° sinüzoidal yönetim şeması, gürültüsüz motor gidiş geliş verimliliği sağlar.
Akıllı kilit algılama işlevinden oluşan DRV10963, güvenli performans elde etmek için ek yerleşik güvenlik devreleriyle bir araya getirilir. DRV10963, üstü açık bir termal şilteye sahip, termal olarak verimli 10 pinli USON ambalajında bulunabilir.
IC Nasıl Çalışır
DRV10963 ürünü, infüze güç MOSFET'lerine sahip 3 fazlı sensörsüz bir motor operatörüdür.
üstün performans, azaltılmış rezonans ve minimum yüzeysel parça sayısı motor sürücü fonksiyonları için özel olarak yaratılmıştır.
Ana sensörsüz penceresiz 180 ° sinüzoidal kontrol planı, elektrikle uyarılan tork dalgalanmasını nominal olarak koruyarak gürültüsüz motor işlevi sunar. Başlatma üzerine, DRV10963 cihazı, motoru FR giriş pini ile belirtilen yönde döndürecektir.
DRV10963 yongası, sinüzoidal kontrol planından yararlanarak 3 fazlı bir BLDC motoru çalıştıracak.
Kullanılan sinüzoidal faz gerilimlerinin önemi, PWM piminin görev döngüsüne bağlıdır. Motor hareket ederken DRV10963 IC, hız verilerini FG pininde iletir.
DRV10963 ünitesi, akıllı kilit algılama özelliğinden oluşur. Motorun harici bir basınçla engellenmesi gibi bir durumda, program kilitleme sorununu belirleyecek ve motorla birlikte kendi başına korumak için önlemler alacaktır.
Kilit algılama devresinin özel prosedürü, Kilit Algılamada ayrıntılı olarak tasvir edilmiştir. DRV10963 IC ayrıca, örneğin aşırı akım koruması, aşırı voltaj koruması, düşük voltaj koruması ve aşırı sıcaklık koruması gibi birden fazla yerleşik güvenlik devresi içerir.
Karakteristik Açıklama
Hız Girişi ve Kontrolü
DRV10963, fazdan faza standart bir sinüzoidal dalga formu yüzdesine sahip olabilen 3 fazlı 25 kl-lz PWM çıkışları sunar. Toprağa göre herhangi bir döngünün belirlenmesi durumunda, tespit edilen dalga biçiminin Şekil 2'de gösterildiği gibi 3. derece harmoniklerle birleştirilmiş bir PWM korumalı sinüzoid olması muhtemeldir.

Bu kodlama stratejisi, muhtemelen genellikle sıfıra eşit olabilecek bir faz çıktısı olacağı için sürücü özelliklerini düzene sokar.
Sonuç genliği, Denklem 1'de tanımlanan ve Şekil 3'te vurgulanan besleme voltajına (VCC) ve zorunlu PWM görev döngüsüne (PWM) göre değişir. Optimum genlik, talimat verilen PWM görev döngüsü YÜZDE 100 olduğunda uygulanır.
Vphpk = PWMdc>

Motor hızı, motor için kullanılacak olan faz gerilimlerinin genliğini düzenlemek için doğrudan PWM sırasının kullanılmasıyla düzenlenmez.
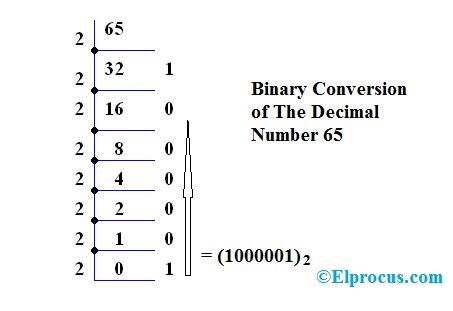
PWM girişinin görev döngüsü, 9 bitlik bir dijital miktara (0'dan 511'e) değiştirilir.
Düzenleme çözünürlüğü 1/512 ==% 0,2'dir. Görev döngüsü analizörü, giriş görev döngüsü ve 9 bitlik dijital şekil arasında bir ilk sipariş değişim işlemini kolaylaştırır.
Bu, r = 80 ms olduğu Şekil 4'te vurgulanmıştır.

DRV10963 cihazında PWM tarafından sipariş edilen görev döngüsü ile maksimum çıkış genliği arasındaki değişim performansı değişkendir.
Sonuç maksimum genliği, PWM komutu> minimum işleyen görev döngüsü olduğunda Denklem 1'de tartışılır. En düşük çalışma görev döngüsü genellikle OTP ayarıyla (MINOP_DC1: 0) muhtemelen% 13,% 10,% 5 veya hiç kısıtlama olmaksızın belirlenir.
Tablo 1, minimum çalışma görev döngüsü için önerilen konfigürasyonları göstermektedir.
PWM tarafından belirtilen görev döngüsü, en düşük işleyen görev döngüsünden daha az ve% 1,5'ten fazla olduğunda, çıktı minimum çalışma görev döngüsünde düzenlenecektir. Giriş görev döngüsünün% 1,5'in altında olduğu her zaman, DRV10963 cihazı büyük olasılıkla çıkışı çalıştırmaz ve bekleme moduna gönderilir.
Bu, Şekil 6'da gösterilebilir.

Rotasyonel Yapılandırmalar
DRV10963, Şekil 7'de ayrıntılı olarak açıklanan bir teknikle motoru çalıştıracaktır.

Motor başlatma grafiği, açık döngüden kapalı döngüye geçiş sınırı (HOW.), Hizalama süresi (TAHQH) ve hızlandırma hızı (RACE) için cihaz tarafından yapılandırılabilir alternatiflerden oluşur.
Rotoru komütasyon mantığına hizalamak için DRV10963, GND'de faz U'yu kontrol ederken aynı zamanda V ve W fazlarında% x görev döngüsü yürütür.
Bu senaryo TAIign saniyeleri için sürdürülmektedir. % X önemi, çeşitli farklı besleme voltajlarında bol miktarda dönme momentini korumak için VCC voltajıyla (Tablo 2'de gösterildiği gibi) tanımlanır.
Hizalama dizisi tamamlandıkça, motor, Tablo 2'de gösterildiği gibi tepe seviyeli sinüzoidal faz voltajları koyarak ve komutasyon seviyesi Hom'a ulaşana kadar RACE tarafından temsil edilen genişleyen bir oranda komütasyon aralığı aracılığıyla artırılarak hızlanmaya zorlanır. ., Hz.
Bu sınıra ulaşılır ulaşılmaz, DRV'0963 kapalı döngü moduna dönüşür, burada komutasyon sürücü ilerlemesi yerleşik kontrol algoritması tarafından tanınırken, kullanılan voltaj PWM zorunlu görev döngüsü girişi tarafından belirlenir.
Kapalı döngü geçiş sınırı (Hom), hizalama süresi (TAHQH) ve hızlanma oranı (RACE) için açık döngü, OTP yapılandırmaları aracılığıyla yapılandırılabilir.
Devir eşiği (HOW) seçimi tipik olarak deneme yanılma değerlendirmesi ile onaylanır. Amaç, mümkün olduğu kadar az olabilecek ve motorun açık döngü hızlanması ile kapalı döngü hızlanması arasında zahmetsizce ve aslına sadık bir şekilde geçiş yapmasını sağlayan bir geçiş toleransını tercih etmektir.
Yaygın olarak artan hız motorları (maksimum hız), yüksek hız motorlarının azaltılmış Kt içermesi dolayısıyla daha uygun fiyatlı BEMF içermesi nedeniyle üstün bir devir toleransı gerektirir.
Tablo 3, geçiş toleransı için yapılandırılabilir tercihleri göstermektedir. Elektriksel Hz'deki en yüksek hız, belirli bir gönderim için istenen aktarım hızının seçilmesine yardımcı olmak için bir referans olarak kanıtlanmıştır.

Hizalama süresi (TAHQH) ve hızlandırma hızı (RACE) seçimi, deneme yanılma incelemesine bile bağlı olabilir.
Daha yüksek ataletli motorlar, genellikle daha hızlı bir hızlanma yüzdesi ile birlikte daha kısa bir hizalama süresi gerektiren düşük ataletli motorların aksine, daha uzun bir hizalama süresi ve daha yavaş bir hızlanma oranı gerektirir. Döndürme süresinin aksine, başlatma istikrarından yararlanmak için program değiş tokuşlarının uygulanması gerekir.
TI, maksimum karşılama oranını desteklemek için tork yukarı süresinden ödün vermek için daha az yoğun konfigürasyonlara (daha yavaş RACE ve önemli Tmign) karar vermekle başlayarak onaylar.
Ekipmanın bilinçli bir şekilde çalıştığı onaylanır onaylanmaz, ekstra güçlü yapılandırmalar (daha büyük RACC ve daha az TAHQH), dönüş anını azaltmak ve aynı zamanda yerine getirme oranını dikkatli bir şekilde takip etmek için kullanılabilir.
Tablo 4, TA'g ,, ve RACE için yapılandırılabilir ayarları göstermektedir.

Bu sensörsüz BLDC IC ile ilgili açıklamanın geri kalan kısmı döşenmiştir. bu orijinal veri sayfasında
Yukarıda tartışılan sensörsüz BLDC motor sürücü devresi ayrıntıları hakkında daha fazla bilgi edinmek için lütfen yorum yapmaktan çekinmeyin.
Önceki: 12V LED Sırt Çantası Güç Kaynağı Devresi Sonraki: MCU'suz Quadcopter Uzaktan Kumanda Devresi