3-Φ içinde Endüksiyon motoru Motorun statoru, 3-besleme girişi içindeki 120 derecelik faz kayması nedeniyle dönen bir manyetik alan veya RMF oluşturacaktır. Dolayısıyla RMF, senkron hız olarak bilinen kendi hızının statoru ile döner ve 'Ns' ile gösterilir. Dönen manyetik alan (RMF), akıdaki değişiklik bir emf indükleyebileceğinden rotorla dönüşüm yapar. Böylece motordaki rotor, gerçek hız (N) olarak bilinen bir hızla dönmeye başlar. Senkronize ve gerçek hız arasındaki temel uyumsuzluk, SLIP olarak bilinir. Motordaki rotor dururken kayma değeri '1' e eşittir ve '0' a eşit olmayacaktır. Bu nedenle, motoru çalıştırırken, senkron hız 'N' ye, yani belirli bir zamandaki gerçek hıza eşdeğer değildir. Bu makale, bir endüksiyon motorundaki kaymaya genel bir bakışı tartışmaktadır.
Asenkron Motorda Kayma Nedir?
Tanım: İndüksiyon Motorunda kayma, her birim senkron hız için ifade edilen rotorun yanı sıra döner manyetik akı arasındaki bir hızdır. Boyutsuz olarak ölçülebilir ve bu motorun değeri sıfır olamaz.

endüksiyon motoru
Döner manyetik akının senkron hızı ve rotorun hızı Ns ve Nr ise motor aralarındaki hız (Ns - Nr) ile eşdeğer olabilir. Yani kayma şu şekilde belirlenebilir:
S = (Ns - Nr) / Ns
Burada, hem rotorun hızı hem de senkron hızı eşdeğer değildir (Nr Bu motorda, eğer güç kaynağı 3 fazlı stator sargısı 3 fazlıdır, bu durumda hava boşluğu içinde dönen bir manyetik alan üretilebilir, bu nedenle bu senkron hız olarak bilinir. Bu hız no ile belirlenebilir. kutupların sıklığı kadar güç kaynağı . Burada kutuplar ve frekans P & S ile gösterilir. Senkron Hız (N) = 2f / Prps (Burada rps, her saniye için devrimdir). Dönen bu manyetik alan, aktif olmayan rotoru kesecektir. iletkenler e.m.f. üretmek için Çünkü rotor devresi kısa devre yapacak ve üretilen emf rotorun mevcut beslemesini artıracaktır. Rotor akımı ve dönen manyetik akı arasındaki arayüz tork oluşturabilir. Böylece Lenz yasasına göre rotor, dönen manyetik alan yönünde dönmeye başlar. Sonuç olarak, bağıl hız (Ns - Nr) 'ye eşdeğerdir ve motor içinde kaymaya neden olacak şekilde aralarında düzenlenmiştir. Asenkron motorda kaymanın önemi, aşağıda kayma değerlerine dayalı olarak tartışılabilir çünkü motor davranışı esas olarak kaymanın değerine bağlıdır. endüksiyon motorunda kayma halkası Kayma değeri '0' ise, rotorun hızı dönen manyetik akıya eşdeğerdir. Dolayısıyla rotor bobinleri arasında dönen manyetik akı kadar hareket yoktur. Dolayısıyla rotor bobinlerinde akı kesme işlemi yoktur. Bu nedenle, rotor akımı oluşturmak için rotor bobinlerinde emf üretilmeyecektir. Yani bu motor çalışmayacak. Bu nedenle, bu motorda pozitif bir kayma değerine sahip olmak çok önemlidir ve bu nedenle, kayma bir endüksiyon motorunda asla '0' olmayacaktır. Kayma değeri '1' ise, motordaki rotor sabit olacaktır Kayma değeri '-1' ise, motordaki rotorun hızı senkronize olarak dönen manyetik akı ile daha karşılaştırılabilir. Bu nedenle, bu yalnızca motor içindeki rotor ana taşıyıcı kullanılarak dönen manyetik akı yönünde döndürüldüğünde mümkündür. Bu yalnızca rotor, bir ana hareket ettirici tarafından dönen manyetik akı yönünde döndürüldüğünde mümkündür. Bu durumda motor, bir endüksiyon jeneratörü olarak çalışır. Motorun kayma değeri birden büyükse rotor manyetik akının dönüşünün tersi yönde dönecektir. Dolayısıyla, manyetik akı saat yönünde dönüyorsa, rotor saat yönünün tersine dönerek dönecektir. Yani aralarındaki hız (Ns + Nr) şeklinde olacaktır. Bu motorun frenlenmesi veya Takılması sırasında, motorun rotorunu hızlı bir şekilde hareketsiz hale getirmek için kayma '1' den daha büyüktür. endüksiyon motorundaki kayma formülü aşağıda verilmiştir. Kayma = (Ns-Nr / Ns) * 100 Yukarıdaki denklemde, 'Ns' rpm cinsinden senkron hızdır, 'Nr' ise rpm cinsinden dönüş hızıdır (her saniye için devir) Motorun senkron hızı 1250 ve gerçek hız 1300 ise, lütfen motordaki kaymayı bulun. İçerisinde = 1250 devir Ns = 1300 dev / dak Hız farkı şu şekilde hesaplanabilir: Nr-Ns = 1300-1250 = 50 Motorda bir kayma bulmanın formülü şudur: (Nr-ns) * 100 / Ns = 50 * 100/1300 =% 3,84 Endüksiyon motorunu tasarlarken kaymanın ölçülmesi önemlidir. Bunun için, farkın nasıl elde edileceğinin yanı sıra kayma yüzdesini anlamak için yukarıdaki formül kullanılır. Bir endüksiyon motorundaki tork ve kayma arasındaki ilişki, kaymayı kullanan tork farkıyla ilgili bilgilerle bir eğri sağlar. Kayma sapması, hız değişimlerinin farkı ile elde edilir ve tork bu hıza eşdeğer de farklı olacaktır. tork ve endüksiyon motorunda kayma arasındaki ilişki Eğri, sürüş, fren oluşturma gibi üç modda tanımlanır ve tork kaymasının özellikleri, düşük kayma, yüksek kayma ve orta kayma gibi üç bölgeye ayrılmıştır. Bu modda, statora besleme verildiğinde, motor senkron altında dönmeye başlar. Bu motorun torku, kayma '0' dan '1' e değiştiğinde değişecektir. Yüksüz durumda sıfırdır, yük durumunda ise birdir. Yukarıdaki eğriden torkun kayma ile doğru orantılı olduğunu gözlemleyebiliriz. Kayma daha fazla olduğunda, daha fazla tork üretilecektir. Bu modda, motor senkron hızdan daha yüksek çalışır. Stator sargısı, elektrik enerjisi sağladığı bir 3-Φ kaynağına bağlanır. Aslında bu motor mekanik enerji alır çünkü hem tork hem de kayma negatiftir ve elektrik enerjisi sağlar. Asenkron motor, reaktif güç kullanarak çalışır, bu nedenle bir jeneratör . Çünkü reaktif güç dışarıdan sağlanmalı ve senkron hızda çalışmakta, daha sonra çıkışta sağlamak yerine elektrik enerjisi kullanmaktadır. Yani, genel olarak, indüksiyon jeneratörler kaçınılır. Bu modda, gerilim beslemesi polarite değiştirildi. Böylece endüksiyon motoru ters yönde dönmeye başlar, böylece motor durur. Bu tür bir yöntem, motorun daha kısa bir süre içinde durdurulması gerektiğinde uygulanabilir. Motor dönmeye başladığında, yük benzer bir yönde hızlanır, böylece motorun hızı senkron hızın üzerine çıkarılabilir. Bu modda, bir indüksiyon jeneratörü gibi çalışır. elektrik enerjisi Senkron hıza kıyasla motor hızını düşürmek için şebekeye bağlayın. Sonuç olarak, motor çalışmayı durdurur. Bu tür kırma ilkesi dinamik kırma, aksi takdirde rejeneratif kırma olarak bilinir. Böylece, bu tamamen endüksiyon motorundaki kaymaya genel bakış . Motor içindeki rotorun hızı senkron hıza eşit olduğunda kayma '0' dır. Rotor, dönen manyetik alan yönünde senkron hızda dönüyorsa, akının kesme eylemi, rotor iletkenlerinde emf ve rotor çubuk iletkeni içinde akım akışı yoktur. Bu nedenle elektromanyetik tork geliştirilemez. Dolayısıyla bu motorun rotoru senkron hıza ulaşamaz. Sonuç olarak, motor içinde kayma hiç sıfır değildir. İşte sana bir soru, ne ben
Asenkron Motorda Kaymanın Önemi

Kayma Değeri '0' olduğunda
Kayma Değeri '1' olduğunda
Kayma Değeri '-1' olduğunda
Kayma Değeri> 1 olduğunda
Formül
Örneğin
Asenkron Motorda Tork ve Kayma Arasındaki İlişki

Sürüş Modu
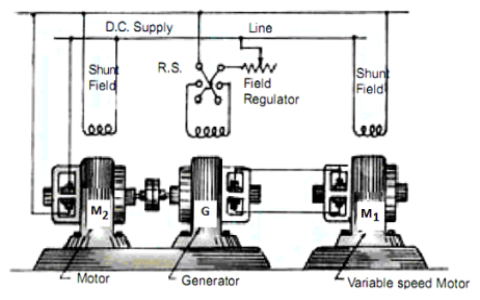
Oluşturma Modu
Frenleme Modu