Gönderi, bir salon etkisi sensör ağı üzerinden bir RPM geri besleme sinyali döngüsü kullanan bir elektronik motor hız regülatörü veya kontrolör devresini tartışıyor. Fikir Bay Imsa Naga tarafından talep edildi.
Devre Amaçları ve Gereklilikleri
- Zaman ayırdığınız için çok teşekkürler. Bu devrenin tek fazlı bir besleme için uygun olacağına inanıyorum. Alternatörüm 3 fazlı 7KvA ve onu hız regülatörü yerine bir hızlandırıcıya sahip dizel araç motoruyla birleştirmek istiyorum.
- Uygulamak istediğim şey - Muhtemelen elektronik servo kontrollü bir mekanizmaya sahip olan bir 'ELEKTRONİK MOTOR HIZI YÖNETİCİSİ' - Bakım için hızlandırma mekanizmasını harekete geçirmek için bir servo motoru çalıştırmak için bir Hız Sensörü devresi (Motor RPM sensörü) alternatöre uygulanan yüke göre motorun sabit bir hızı.
- Bu, frekansın yanı sıra jeneratörün voltajının korunmasına yardımcı olacaktır. Servo motoru, motor devrindeki değişikliğe göre her iki yöne de döndürülebilecek şekilde kontrol etmek için nazikçe bir devre tasarlarsanız, mekanik yönle ilgilenebilirim. Beklentide çok teşekkür ederim.
Devre şeması

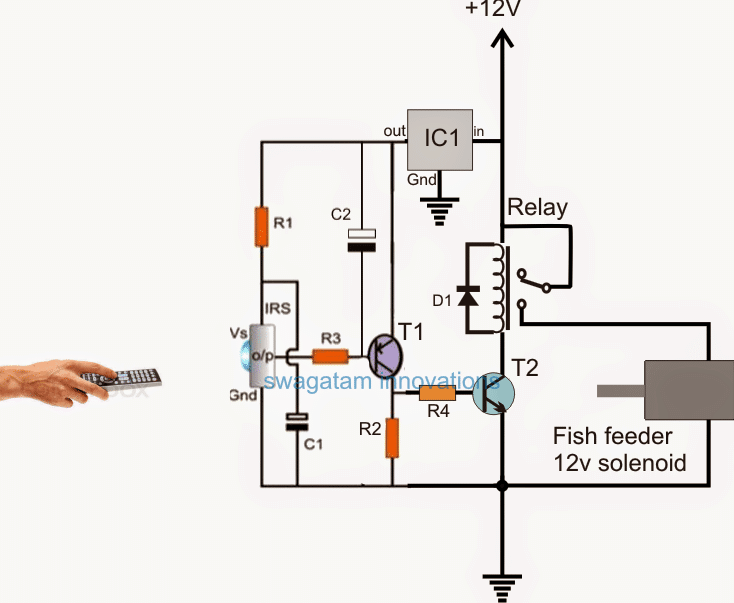
NOT: MOTOR 12 V YAY YÜKLÜ SOLENOİD İLE DEĞİŞTİRİLEBİLİR
Dizayn
Bir dizel motor hız regülatörü veya kontrolörünün devresi, bir geri besleme RPM işlemcisi veya bir takometre devresi
Sol taraf IC1 555 aşaması, bir ile yapılandırılmış basit bir takometre devresi oluşturur. Hall etkisi sensörü RPM oranını algılamak için motorun yük tekerleğine takılır.
RPM, orantılı olarak değişen bir darbe hızına veya frekansa dönüştürülür ve IC1'in 2 numaralı pimini değiştirmek için bir BJT'nin tabanına uygulanır.
Devre Çalışması
IC1 temelde monostabil modda düzenlenmiştir, bu da çıktısının orantılı olarak ayarlanabilen bir AÇIK / KAPALI anahtarlama oluşturmasına neden olur, bunun süresi gösterilen 1M pot kullanılarak ayarlanır.
Uzatılmış zamanlı darbeler formundaki RPM içeriğini taşıyan IC1'den gelen çıktı, direnç 1K, 10K ve 22uF kullanan bir çift RC bileşeninden oluşan bir entegratör aşaması tarafından yeterince düzleştirilir. 2.2 uF kapasitörler.
Bu aşama, monostabilin kaba RPM verilerini makul ölçüde sorunsuz değişen veya üssel olarak değişen bir voltaja dönüştürür.
Bu üssel olarak değişen voltaj, bir kararsız devre olarak yapılandırılmış bir sonraki IC2 555 aşamasının pim # 5 ile bağlantılı olarak görülebilir.
Bu kararsız maddenin işlevi, normal çalışma koşullarında 3 numaralı piminde çok dar veya düşük bir PWM çıkışı üretmektir.
Burada normal çalışma koşulu, algılanan RPM'nin belirtilen limit içinde olduğu ve IC2'nin 5 numaralı pini, verici takipçisinden herhangi bir voltaj girişi almadığı durumu ifade eder. Bu düşük PWM çıkışı, IC2 pin # 6/2 ve pin # 7 ile ilişkili iki 100k direnci ve 1uF kapasitörünü uygun şekilde ayarlayarak uygulanabilir.
IC2'nin 3 numaralı piminden gelen bu düşük PWM, TIP122'yi yeterince sert bir şekilde değiştiremez ve bu nedenle, belirtilen motor tekerleği düzeneği gerekli momentumu alamaz ve bu nedenle devre dışı kalır.
Bununla birlikte, RPM yükselmeye başladığında, takometre üssel olarak daha yüksek voltajlar üretmeye başlar ve bu da IC2'nin 5 numaralı piminde orantılı olarak artan bir voltaja neden olur.
Bu daha sonra TIP122'nin daha sert davranmasına ve bağlı motorun yeterli tork kazanmasına izin verir, böylece takılı gaz pedalına yavaşlama moduna doğru basmaya başlar.
Bu prosedür dizel motoru hızını düşürmeye zorlar, bu da takometre ve PWM aşamalarının orijinal koşullarına geri dönmesine neden olur ve dizel motor için gerekli kontrollü hızı uygular.
Gösterilen hızlandırıcı motor düzenlemesi yerine, TIP122'nin toplayıcısı alternatif olarak CDI ünitesi dizel motorun, tartışılan elektronik motor hızı kontrolünün veya elektronik motor hızı regülatör devresinin katı hal ve daha güvenilir bir şekilde uygulanmasını kolaylaştırmak için özdeş bir hız azaltımı için.
Nasıl kurulur
Başlangıçta IC2'nin 5 numaralı pini ile verici takipçi bağlantısını kaldırarak IC1, IC2 aşamalarını ayırın.
Daha sonra, iki 100k direncin uygun şekilde değiştirildiğinden ve IC2'nin 3 numaralı pini mümkün olan en dar PWM'leri oluşturacak şekilde ayarlandığından emin olun (@ yaklaşık% 5 AÇIK zaman oranı).
Bundan sonra, bir 0 ila 12V ayarlanabilir güç kaynağı , IC2'nin 5 numaralı pimine değişken bir voltaj uygulayın ve 3 numaralı pimde orantılı olarak artan PWM'yi doğrulayın.
Kararsız bölüm test edildikten sonra, takometre, istenen aşırı limit RPM'ye karşılık gelen bilinen bir RPM darbeleri uygulanarak kontrol edilmelidir. Verici takipçisi BJT temel ön ayarı sırasında, vericisi en az 10V veya IC2 PWM'nin bağlı pedal kontrol motorunda gerekli torku üretmesine neden olacak kadar yeterli bir seviye üretebilir.
Biraz daha ince ayar ve denemeden sonra, motor ve ona bağlı yük için gerekli otomatik hız kontrolünü elde etmeyi bekleyebilirsiniz.
GÜNCELLEME
Motor, yay yüklü bir solenoid ile değiştirilirse, yukarıdaki tasarım aşağıda verildiği gibi çok daha basitleştirilebilir:

Solenoid şaft, amaçlanan otomatik motor devri düzenlemesini gerçekleştirmek için gaz pedalıyla birleştirilebilir.
Frekans-voltaj dönüştürücü ile ilgili daha fazla seçenek için, bkz. Bu makale .
Önceki: Zamanlayıcı Kontrollü Spor Salonu Uygulama Devresi Sonraki: Pili Piezo Mat Devresi ile Şarj Etme