
Robotlar, bir elektronik devre veya bilgisayar programı tarafından kontrol edilen, insanlara veya hayvanlara benzeyen otomatik elektro-mekanik cihazlardır. Farklı türde robotlar vardır. farklı uygulama türleri . Robotik teknolojideki son trendler, ameliyatlar için kullanılan uzaktan manipülatörler (özellikle anahtar deliği cerrahisi), yürüme yoluyla hareket edebilen çoğunlukla çok bacaklı yürüme robotları, mikrobotlar ve nanobotlar gibi gelişmiş robotlar geliştirmektedir ve bunlar nano robotlar veya insan vücudunda hastalıkları tedavi etmek için kullanılan nano cihazlar, geziciler, uzay araştırmaları için diğer gezegenlerde yürümek için kullanılan tekerlekli robotlardır. Genellikle uzay uygulamalarında kullanılan robotlar otonom robotlar , modüler yeniden yapılandırılabilir robotlar veya kendi kendine yeniden yapılandırılabilir modüler robotlar vb.
Modüler Yeniden Yapılandırılabilir Robotlar
Modüler yeniden yapılandırılabilir robotlar, genellikle ayarlanabilir morfolojiye sahip otonom kinematik cihazlardır. Sabit morfolojili robotlarda yalnızca çalıştırma, algılama ve kontrol gibi geleneksel görevler yalnızca gerçekleştirilebilir. Ancak, kendi kendine yeniden yapılandırılabilir robotlar veya modüler yeniden yapılandırılabilir robotlar, yeni koşulları uyarlamak, yeni görevleri yerine getirmek ve hasarlardan kurtulmak için parça bağlantılarını yeniden düzenleyerek kendi şekillerini değiştirebilir.

Modüler Yeniden Yapılandırılabilir Robotlar
Kendi kendine yeniden yapılandırılabilen bu robotlar, geçmeleri gereken yola göre şekillerini değiştirebilen robotlar olarak tanımlanabilir. Örneğin, bir robotun dar bir borudan geçmesi gerekiyorsa, o zaman kendini bir solucan şeklinde yeniden yapılandıracak ve engebeli bir araziyi geçmesi gerekiyorsa, örümcek benzeri bacaklarla şeklini yeniden yapılandıracaktır. Düz bir arazi varsa, hızlı hareket için kendini top benzeri bir yapı olarak yeniden yapılandıracaktır.
Bu yeniden yapılandırılabilir robotlar, tasarıma bağlı olarak yine iki türe ayrılır. Homojen modüler robotik sistemler gibi şunlardan oluşur: birkaç modül gerekli bir görevi yerine getirecek bir yapı oluşturmak için benzer tasarıma sahip. Heterojen modüler bir robotik sistem, her biri belirli işlevleri yerine getiren farklı tasarımlara sahip birkaç modülden oluşur ve bunlar gerekli bir görevi yerine getiren bir yapı oluşturmak için kullanılır.
Uzay Uygulamalarında Yeniden Yapılandırılabilir Robotlar
Diğer gezegenler üzerinde yapılan araştırmanın bir parçası olarak, birçok ülke, gezegenlerin koşullarını ve özelliklerini incelemek için sık sık birkaç uydu veya uzay görevi başlatıyor. Bu nedenle, uzun vadeli veri elde etmek için uzun vadeli uzay görevleri başlatılıyor ve bu uzun vadeli uzay görevleri tipik olarak kendi kendine yeniden yapılandırılabilen sistemlerdir.
Bu kendi kendine yeniden yapılandırılabilir robotlar, beklenmedik durumlarla başa çıkma ve herhangi bir hasar durumunda kendi kendini onarma yeteneğine sahiptir. Uzay görevlerinin çok büyük ve kitlesel olarak kısıtlı olduğunu biliyoruz, bu nedenle birden fazla görevi yerine getirebilen kendi kendine yapılandırılabilen robotları kullanırsak fayda sağlar. çoklu robotlar her biri yalnızca belirli bir görevi yerine getirir.

Uzay Uygulamalarında Kullanılan Robotlar
Bugüne kadar, dünya gezegeninin sadece ay olduğu dışında insanlar ayak bastı. Oysa uzay uygulamalarında kullanılan modüler robotlar diğer birçok gezegende fırlatılıyor. Mars'a gönderilen bir dizi iniş, manipülatör, yörünge ve gezici, uzay uygulamalarında kullanılan ünlü robotlardır.
Robotik Manipülatörler ve Gezginler
Uzayda eklemli robotlar tarafından gerçekleştirilen çeşitli görev türleri vardır. Uzayda aparat veya ekipmana servis verme sürecine eklemli robotlar tarafından yapılan uzay manipülasyonu denir. Polybot, uzay istasyonu veya uydu bakımı ve denetimi için çok uygundur. Robotik manipülatörler, insan manipülasyon yeteneklerini taklit etmek için uzayda veya diğer gezegenlerde konumlanmak üzere projelendirilir. Genellikle serbest uçan uzay aracında veya diğer uzay araçlarının yörünge ayarlarında, uzay araçları, gezegensel iniş araçları ve numune almak için geziciler içinde konumlandırılırlar.

Robot Manipülatörü
Robotik geziciler, insan hareketi yeteneklerini taklit etmek için gezegenlerde konumlandırılmak üzere öngörülmüştür. Genellikle karasal gezegen yüzeylerinde konumlanırlar, küçük güneş sistemleri aerobotlar (gezegensel atmosferler), cydrobotlar (buz tabakaları) ve hidrobotlar (sıvı tabakalar).
Otomatik Tasarım ve Optimizasyon
Modüler yeniden yapılandırılabilir robotlar veya modüler robotik sistem, her bir görevi gerçekleştirmek için en iyi morfolojiyi ve kontrol yapısını seçmeye ve tasarlamaya yardımcı olmak için yazılım araçlarıyla birleştirilir. Bu tasarımın birçok özelliği kaçınılmaz olarak öngörülebilir bir gelecek için insan zekasına bağlı olacak olsa da, diğer özellikler otomatikleştirilmiş tasarım ve optimizasyon için uygundur. Uzay uygulamalarında kullanılan tüm yeniden yapılandırılabilir robotlar, fırlatma gerilimleri, uzaydaki radyasyon, vakum, gezegensel dağılım ve gezegenin çevresi (yeniden yapılandırılabilir robotların kullanıldığı gezegen veya hedef gezegenler) ile hayatta kalabilecek şekilde tasarlanmalıdır.
Yeniden yapılandırılabilir robotların iki tür tasarımı vardır ve bunlar: Kafes tabanlı tasarımlar ve Zincir tabanlı tasarımlar.

Yeniden Yapılandırılabilir Erkek Robotun Kafes Tabanlı Tasarımları
Kafes tabanlı tasarımlarda yeniden yapılandırma kolaydır, ancak hareket oluşturmak zordur ve bu tasarım daha fazla sayıda konektör ve aktüatör gerektirir.

Yeniden Yapılandırılabilir Robotun Zincir Tabanlı Tasarımları
Zincir tabanlı tasarımlarda yeniden yapılandırma zordur ve yetersiz sertliğe sahiptir, ancak hareket oluşturmak kolaydır.
Modüler Yeniden Yapılandırılabilir Robot Simülasyonu
Fiziğe dayalı bir yazılım simülasyon ortamı, kullanıcıların çeşitli modüller kullanarak yeniden yapılandırılabilir robotlar oluşturmasını kolaylaştıran C ++ kullanılarak geliştirilmiştir. Simülasyonu genişletmek için uyumlu konektörlerle ek modül türleri eklenir.
Kendi Kendine Yapılandırılabilen Modüler Robotun Pratik Örneği

Modüler Trafo Modülü
Modüler transformatör, sıklıkla kullanılan yeniden yapılandırılabilir robotlardan biridir ve bu M-TRAN modülleri, 3 boyutlu yapı (kendi konfigürasyonunu değiştirebilen ve aynı zamanda küçük robotlar üretebilen), çoklu DOF robotu (esnek bir şekilde lokomotlar) oluşturmak için kullanılır, ve metamorfoz robot. Bu modüler transformatör, iki aktüatör ve bataryadan oluşur.

M-TRAN Modülünün İç Şeması
M-TRAN modülünün dahili blok şeması, Li-ion pil, doğrusal olmayan yay, güç kaynağı devresi, ana CPU, hızlanma sensörü, kalıcı mıknatıs, SMA bobini, bağlantı plakası ve PIC'den oluşur.
Bu yeniden yapılandırılabilir robotlar, telekomünikasyon sağlama, veri dönüşü için dünya üzerinde gözlem, askeri fizibilite gibi belirli hedeflere ulaşmak için uzay uygulamalarında kullanılır. navigasyon amaçları .
Diğer birçok robotik tabanlı proje ve uygulama vardır:
- Ultrasonik Engel Algılamalı Robotik Araç
- Cep Telefonuyla Robotik Araç Hareketi
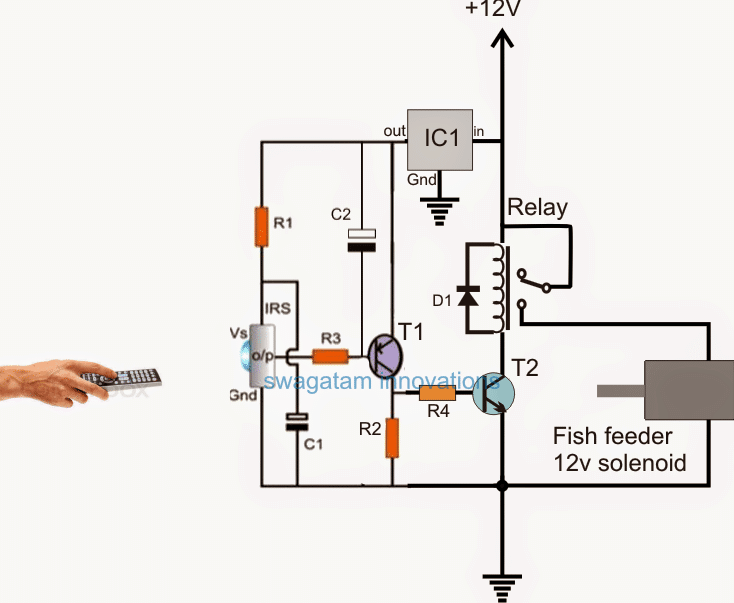
- TV Uzaktan Kumandasıyla Çalışan Robotik Araç
- Palet Algılama Robotik Araç Hareketi
- Yangınla Mücadele Robotu
- Ses Kontrollü Robotik Araç
- N Place Robot Seç Android tarafından Kablosuz olarak kontrol edilir
- Metal Dedektörlü Robotik Araç
- Oto Metro Treni İstasyonlar Arası Servis
- RF Kontrollü Robotik Araç
- Dokunmatik Ekran Tabanlı Uzaktan Kumandalı Robotik Araç
Umarım bu makale uzay uygulamalarında kullanılan modüler yeniden yapılandırılabilir robotlar hakkında kısa bilgi verir. Hakkında daha fazla bilgi için robotik tabanlı elektronik projeler Aşağıdaki yorumlar bölümünde sorularınızı yazarak bize ulaşabilirsiniz.
Fotoğrafa katkı verenler
- Modüler Yeniden Yapılandırılabilir Robotlar asmedigitalcollection
- Uzay Uygulamalarında Kullanılan Robotlar robotnor
- Tarafından Robot Manipulator iccrobotics
- Yeniden Yapılandırılabilir Erkek Robotun Kafes Tabanlı Tasarımları csail.mit
- Yeniden Yapılandırılabilir Robotun Zincir Tabanlı Tasarımları wikimedia
- Modüler Trafo Modülü unit.aist
- M-TRAN Modülünün İç Şeması Slidesharecdn











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}